2. Entstanden ist diese Idee aus einer Blödelei mit unserem Professor K. v. Luck, als wir uns vorhandene Plattformen für ein neues Projekt angeschaut haben. Unsere Aussage war, dass seine vorhandenen Plattformen ja nur Spielereien seinen und keine Belastung aushalten würden, da sie bisher entweder aus LEGO® oder aus Plastik gebaut waren. Aufgrund dieser Aussage musste eine stabile Plattform her, die auch grössere Steuerungen transportieren könnte.
![]()
3. Nachfolgend eine kurze Auflistung aller Anforderungen an die Plattform.
- robust
- verhältnismässig schnell ( > Schrittgeschwindigkeit)
- evtl. geländegängig
- maximal Grösse DIN A4
- einfacher Antrieb
- leicht
- viel Platz für Aufbauten und Zusatzanbauten
- geringer Baukostenaufwand
4. Bei der Neuentwicklung einer Roboterplattform müssen einige Eigenschaften von vornherein mit berücksichtigt werden. Das endgültige Gewicht wird sich auf den Antrieb und somit auf die Laufzeit niederschlagen. Die Laufzeit lässt sich allerdings mit einem grösseren Akkumulator erhöhen. Unterschiedliche Akkus, die auf dieser Plattform Verwendung finden, sind in den nachfolgenden Bildern dargestellt.


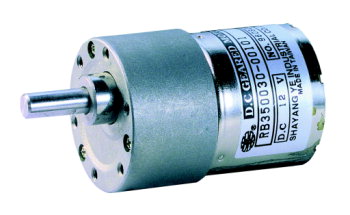
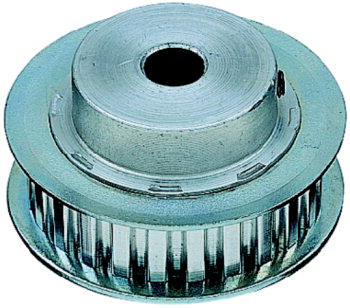
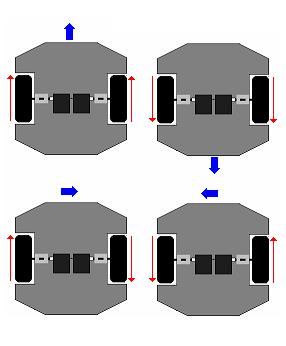
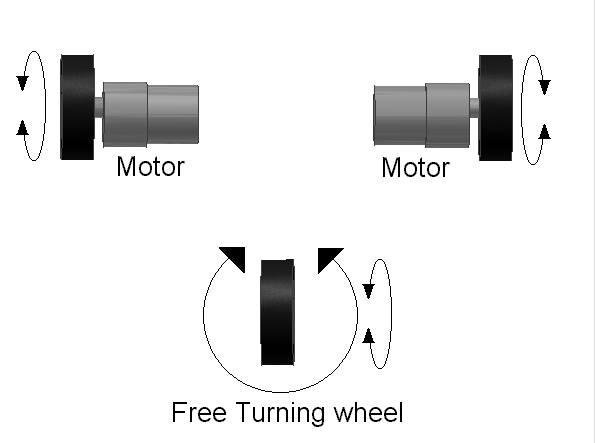
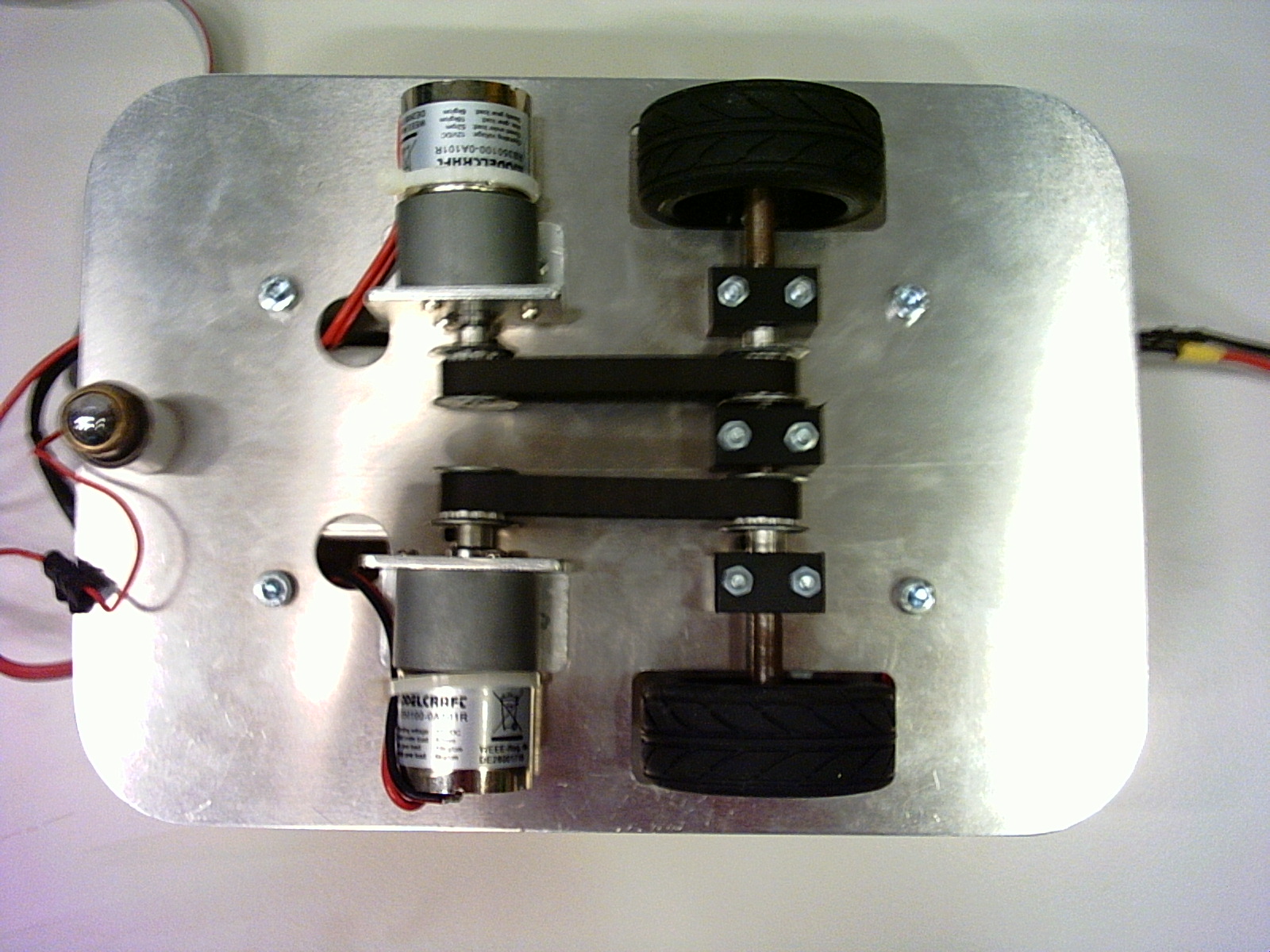
Des Weiteren ist die Laufzeit und die Geschwindigkeit abhängig von dem Antrieb. Da mindestens Schrittgeschwindigkeit zu erreichen ist, und die ganze Plattform robust gebaut sein soll, musste auch der Antrieb dementsprechend konstruiert werden. Ein geeigneter Antrieb, der alle diese Eigenschaften vereint, ist ein Differential Drive. In den folgenden vier Bildern sind die Einzelteile des Differential Drives zu sehen.

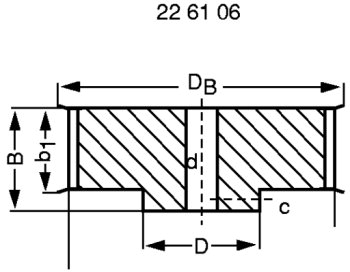
Technische Details des Differential Drive.
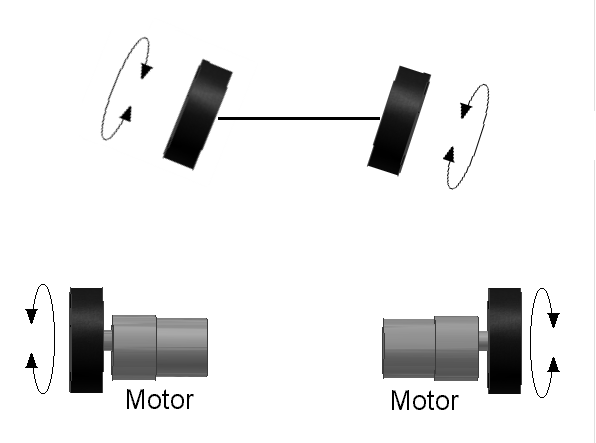
Nachfolgend ist eine kurze Beschreibung des Aufbaus eines Differential Drives. Anhand dieser Skizzen wurde die Plattform konstruiert.
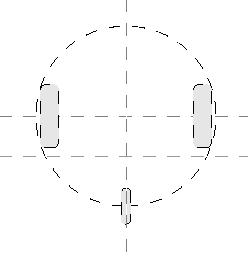
Die folgenden Bilder zeigen zwei verschiedene Möglichkeiten zur Anbringung eines Stützrades, bei nicht austarierten Plattformen. Die hier beschriebene Plattform ist nicht austariert, da der Aufwand für eine Versuchsplattform mit wechselnden Aufbauten zu gross wäre.
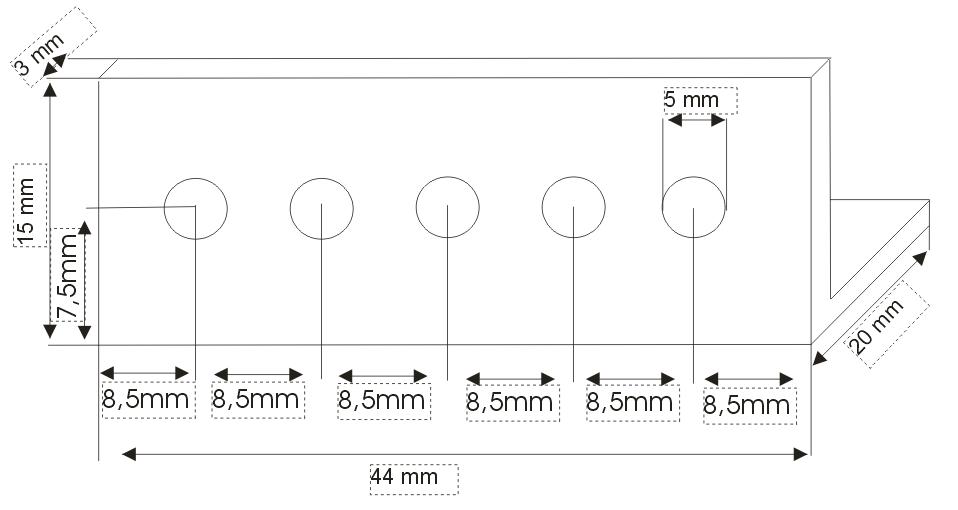
5. Nachfolgend sind die Konstruktionszeichnungen der zwei Trägerebenen, der Antriebsaufhängungen und der Sensorträger zu sehen. Diese Bauteile wurden alle auf einer CNC-Fräs- / Drehbank aus Aluminium gefertigt. Optional ist eine Holzträgerplatte, auf der Steuerplatinen direkt befestigt werden können. Eine andere Lösung für dieses Problem wären Abstandshalter aus Kunststoff.
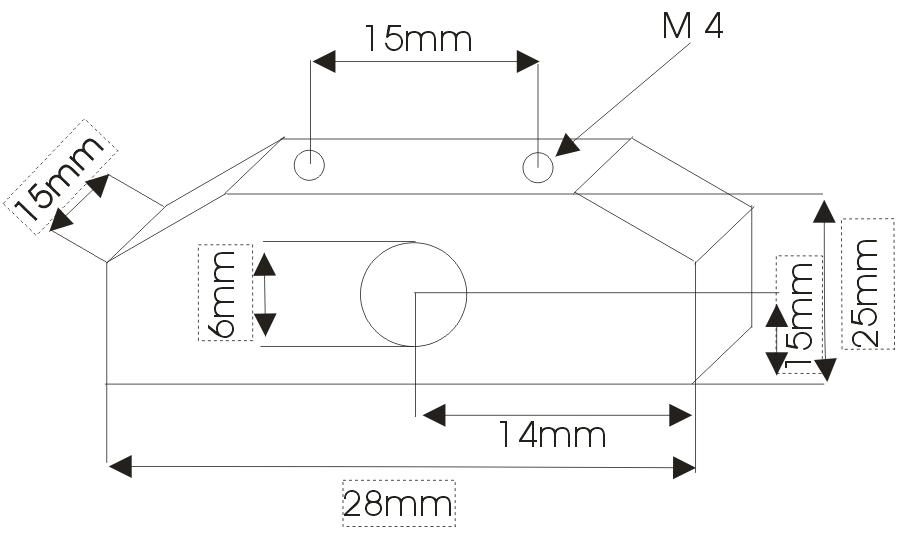
Nun folgen die einzelnen Konstruktionszeichnungen. Als erstes ein Winkel für LEDs, in diesen können Statusleds oder Sensoren (Infrarotleds, usw.) eingebaut werden. Für eine Roboterplattform wird ein Winkel benötigt.
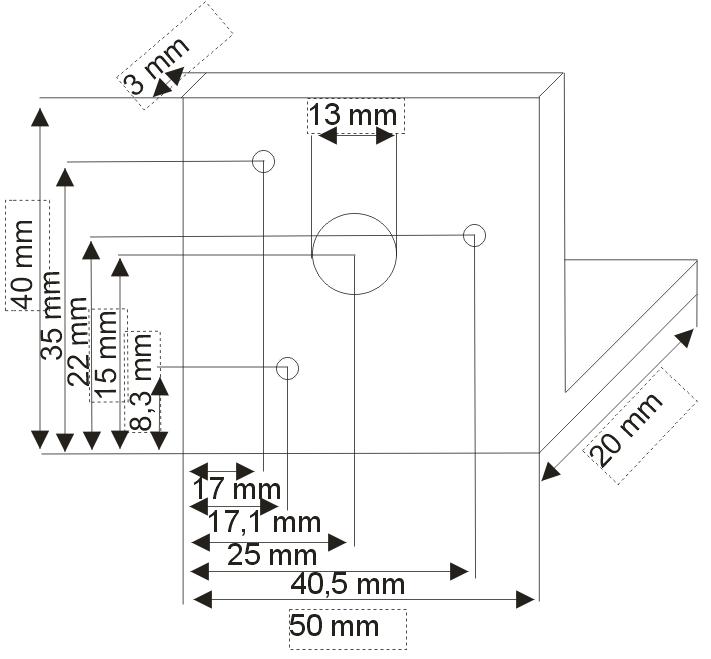
Als zweites ein Sensorträger für Sharps und gleichzeitige Akkuhalterung für Racingakkus. Diese verhindert das Rausrutschen des Akkus aus der folgenden Akkuhalterung. In den noch folgenden Trägerplattformen sind nur Haltelöcher für einen Sensorträger vorhanden, da der Akku auf der zweiten Seite durch eine Schraube mit Kugelkopf gesichert wurde. Es ist allerdings möglich auf beiden Seiten einen Sensorträger als Akkuhalterung anzubringen.
Als drittes die Akkuhalterung für Racing- und schmale Bleiakkus. Pro Roboterplattform wird eine benötigt.
Als viertes sind die Motorhaltewinkel dargestellt. Diese können auch bei Conrad Elektronik bezogen werden, allerdings in minderer Qualität. Deshalb wurden sie für diese Anwendung, mit stärkerer Wandstärke, selbst gefertigt. Da zwei Motoren verwendet werden, sind auch zwei Motorhaltewinkel von Nöten.
Als fünftes ist der Wellenhalter aufgezeigt. Von diesem Wellenhalter werden drei pro Roboterplattform benötigt, um die Wellen zu stabilisieren.
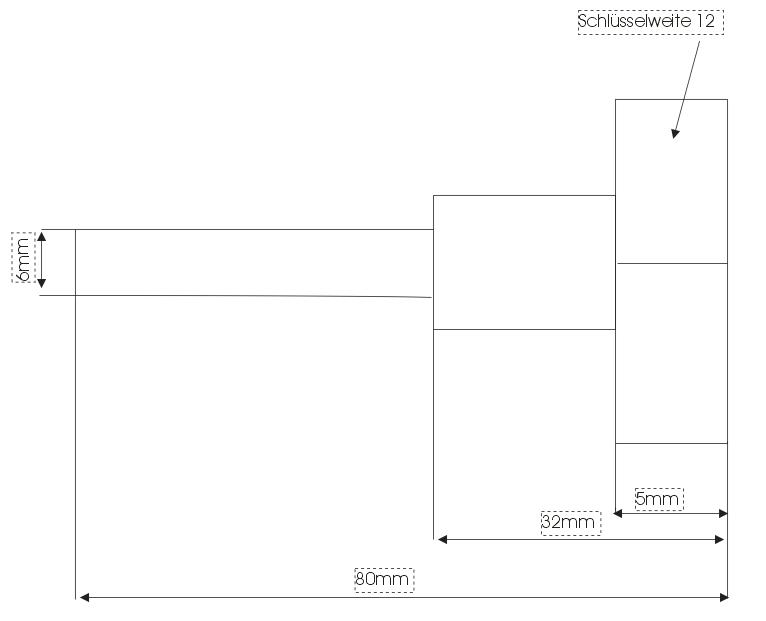
Als sechstes ist die Welle aufgeführt. Die Wellen (zwei pro Plattform) sind am Ende mit Sechskantstücken ausgestattet, um ein verdrehen der Felgen auf der Welle zu verhindern und somit die gesamte Kraft übertragen zu können.
Abschliessend fehlen noch die untere- und obere- Trägerplatte mit seinen Verbindungselementen um eine vollständige Roboterplattform herstellen zu können.
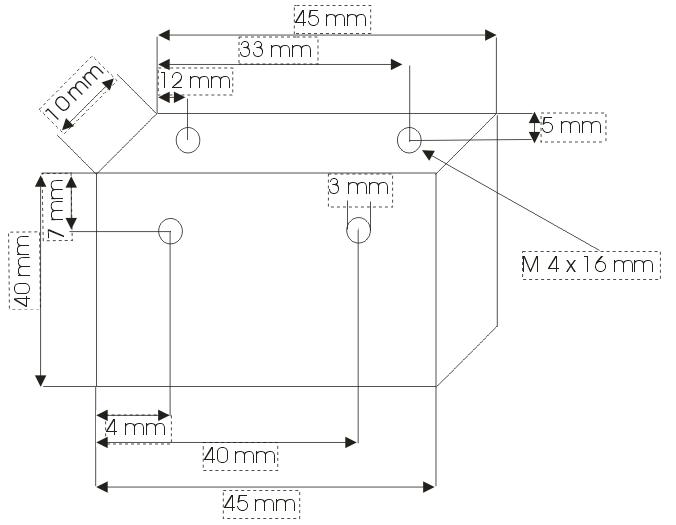
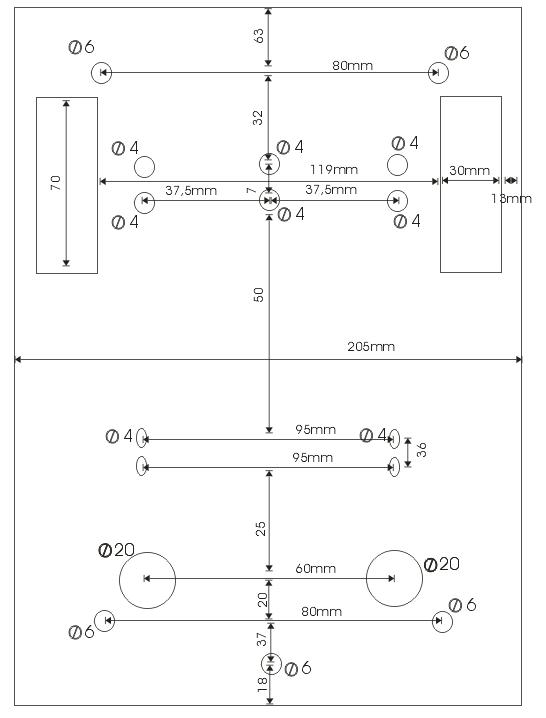
Nachfolgend ist die untere Trägerebene dargestellt.
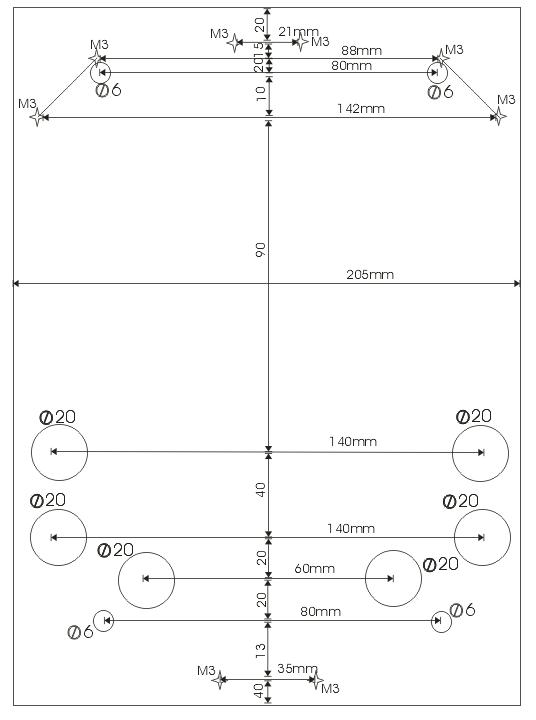
Nachfolgend ist die obere Trägerebene dargestellt.
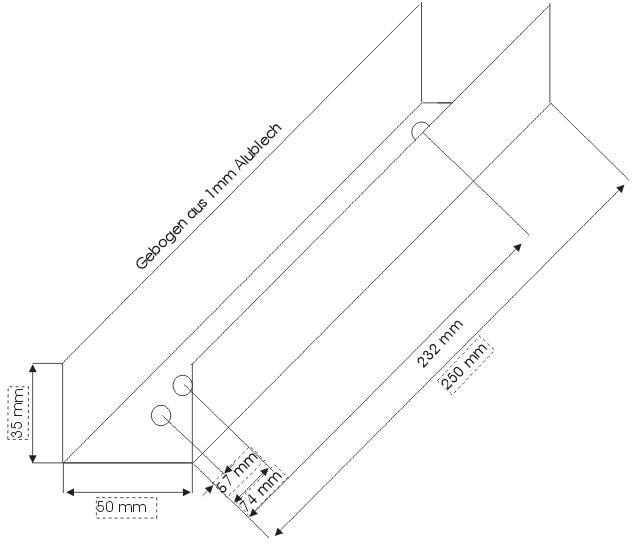
Nachfolgend sind die Verbindungselemente zwischen den Trägerebenen dargestellt. Für die Verbindung beider Trägerebenen werden vier Verbindungselemente benötigt.

6. Im folgenden Abschnitt sollen verschiedene Steuerungen für die Plattform vorgestellt werden. Nachfolgend sind zwei verschiedene Hersteller kostengünstiger Entwicklungsboards aufgeführt. Zum einen eine Steuerung der FH Brandenburg, die speziell für den Robo-Cup entwickelt wurde, mit dem Namen Aksen-Board.

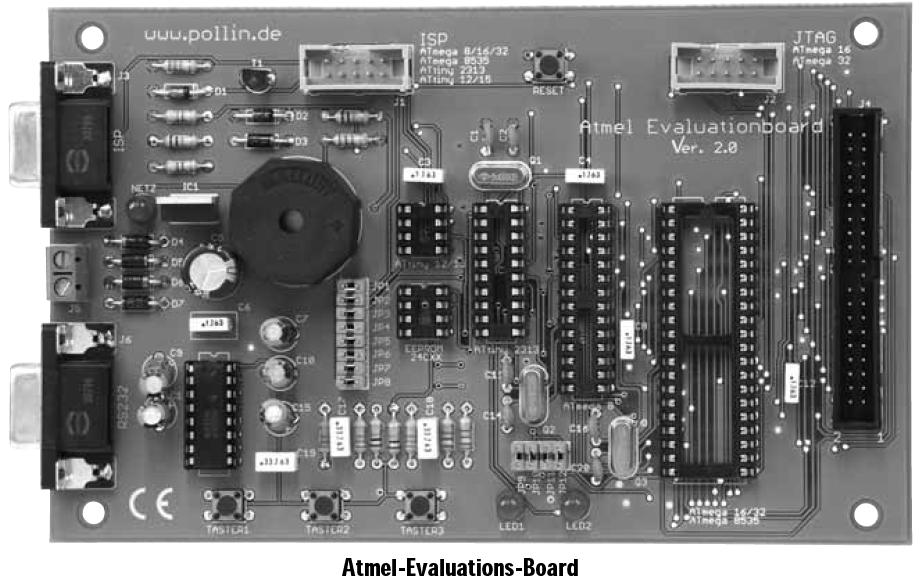
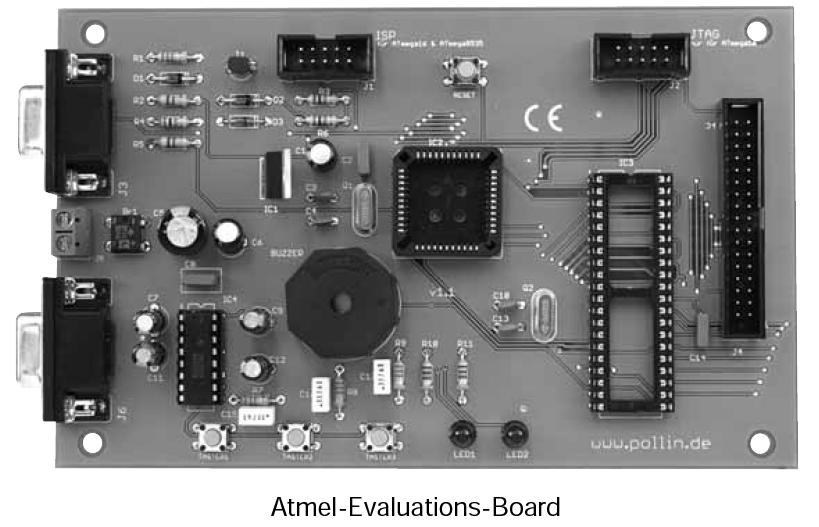
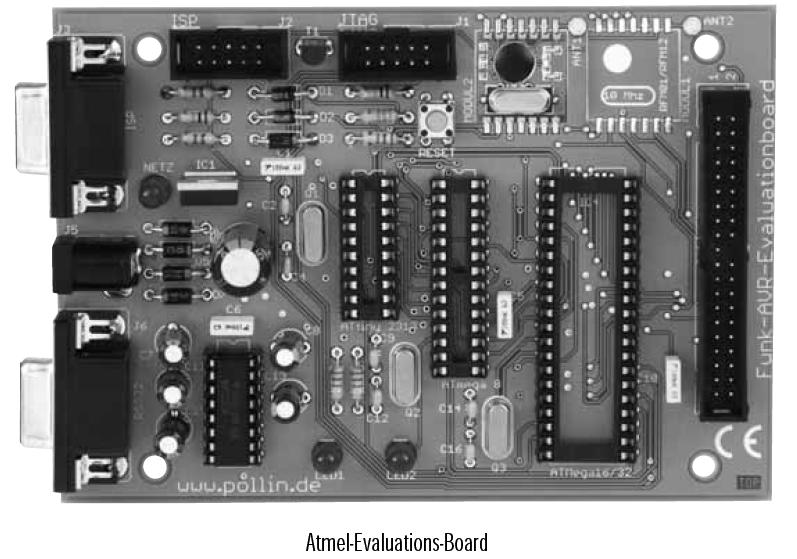
Als zweite getestete Möglichkeit sollen drei Entwicklungsplatinen der Firma Pollin vorgestellt werden. Diese Platinen sind auf der Atmel Basis aufgebaut, benötigen allerdings im Gegensatz zum Aksenboard noch seperate Motortreiber.
Als alternative Steuerungen lassen sich auch Subnotebooks einsetzen. Dafür wurde die aufgesetzte Holzplattform als Untergrund verwendet. Unterhalb der zweiten Trägerplattform befinden sich die Halterungen für die Sensoren. Insgesamt sind auf der Roboterplattform fünf Sensorträger verbaut. Vier nach vorn, davon drei für Abstandssensoren (Sharps) und einen für Infrarot-Leuchtdioden (IR-LED) und einen Sensorträger, für Sharps, nach hinten.

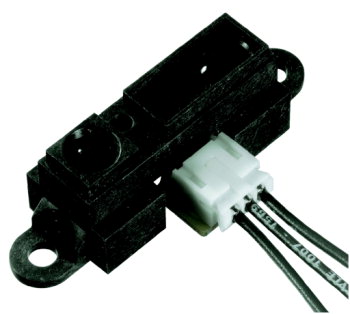
Des Weitern könnte auch ein Ultraschallentfernungsmesser anstatt der Sharps angebracht werden. Nachfolgend ein Designbeispiel der Firma Pollin.

Abschliessend möchte ich noch sagen, dass diese schwerlast Experimentierplattform für fast jede Anwendung zu gebrauchen ist da sie mehr als 10kg (Kasten Bier und 30Ah Bleiakku) tragen kann. Durch ihre handliche Form kann sie auch ohne weiteres im Heimberich Anwendungen finden. Erweiterungsmöglichkeiten dieser Plattform wäre eine Funksteuerung, die durch das letzte vorgestellte Entwicklungsboard der Firma Pollin vorbereitet wäre.
- Eingesetzt wurde diese Plattform bereits von Björn Kaiser und Andre Gratz während des Projektes Konzeption eines autonomen Zeppelins mit Patternerkennung und prototypischer Umsetzung (2007).
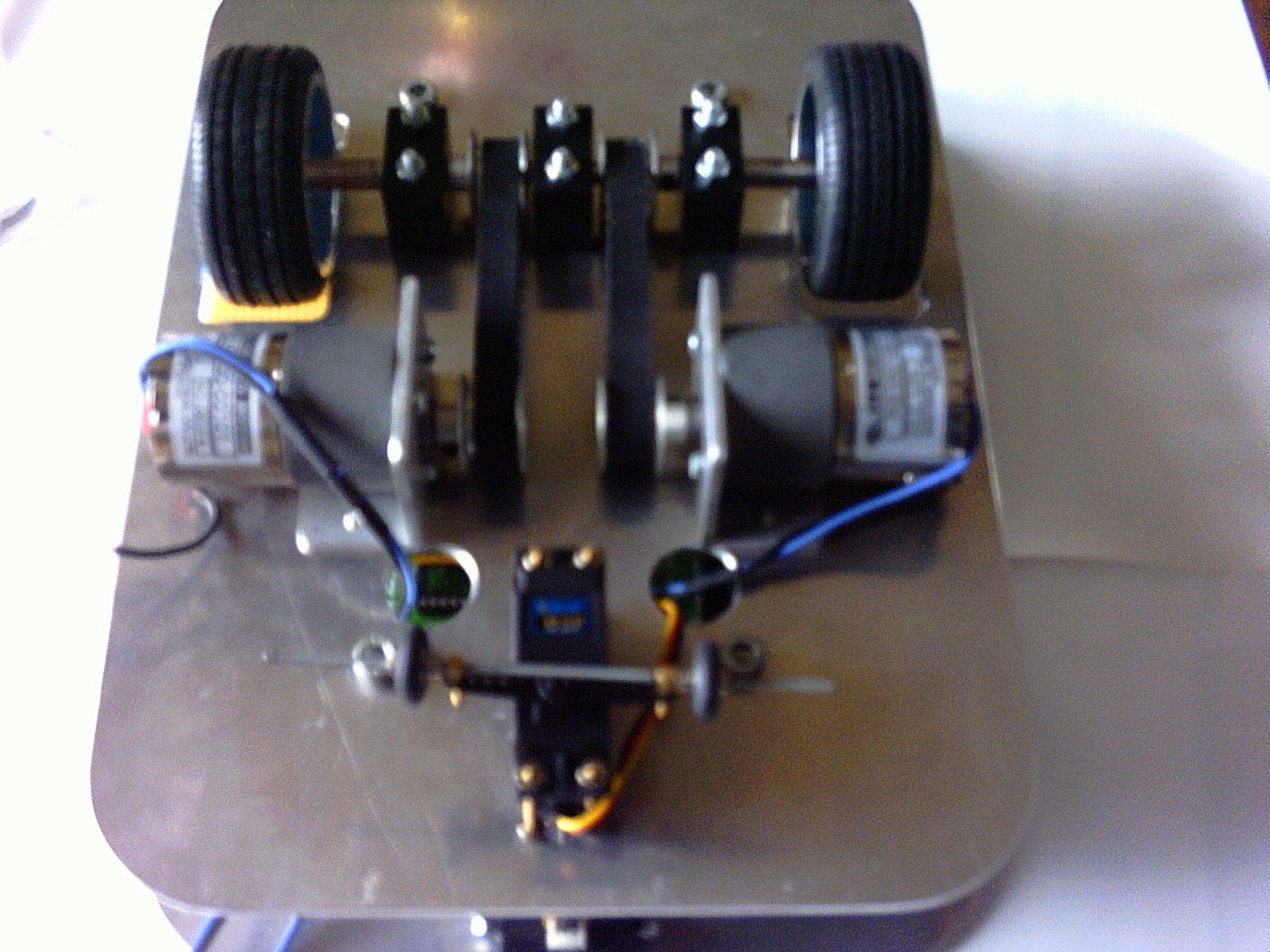
- Ein Nachbau dieser Plattform, aus Privatem besitz, sieht folgendermassen aus. Verbaut wurden: ein schon angesprochenes Entwicklungsboard von der Firma Pollin, den dazugehörigen Ultraschallentfernungsmesser, ein Sharp, zwei Fahrtenregler der Firma Conrad Electronik und ein 12V Bleiakku. Desweiteren ein Servo um die Hinterachse steuern zu können. Dadurch verliert die Plattform allerdings ihre Geländegängigkeit.
Weitere Praxisberichte werden noch folgen.
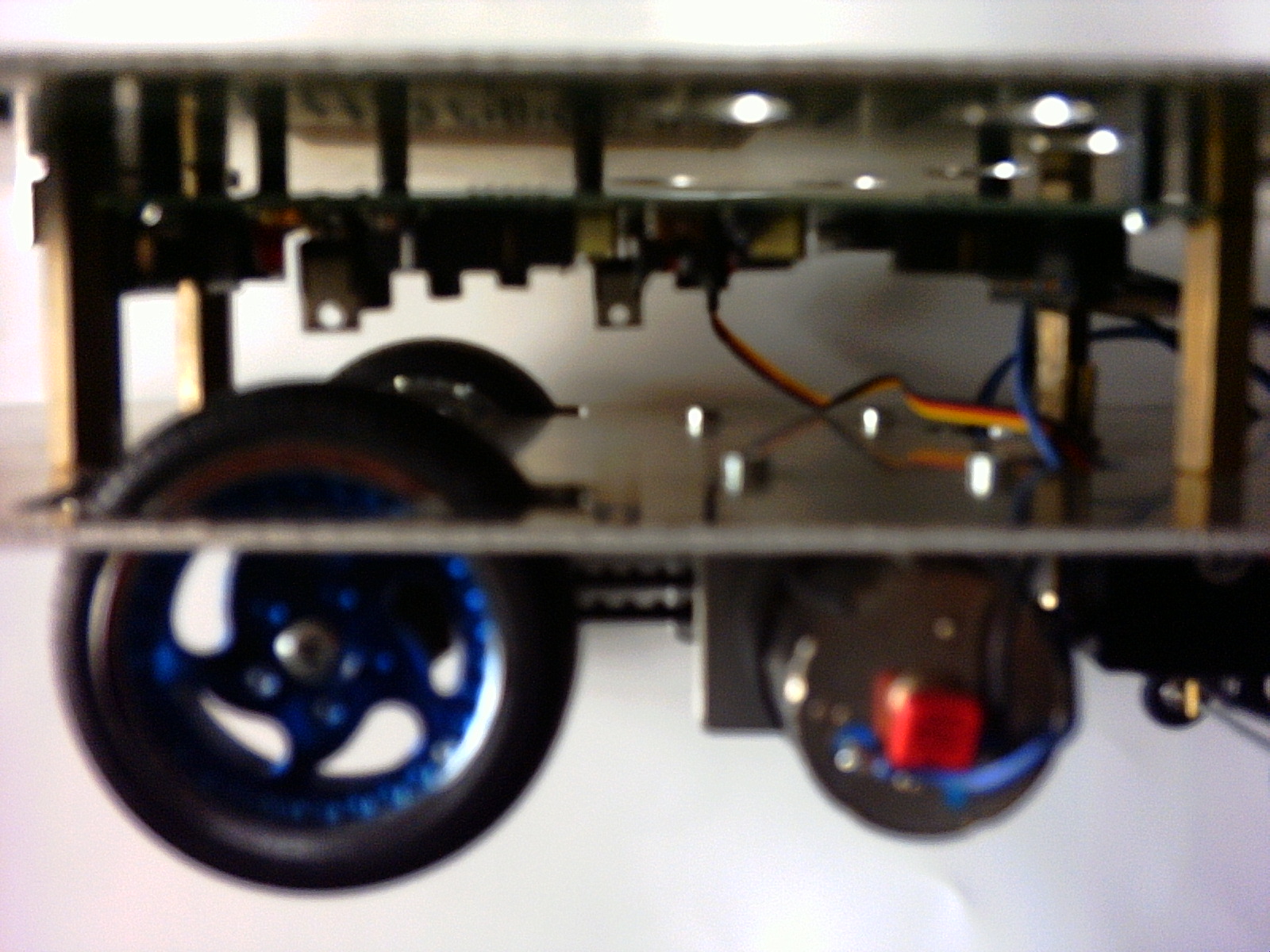
Roboterplattform von unten
zu sehen ist der stabile Zahnriemenantrieb
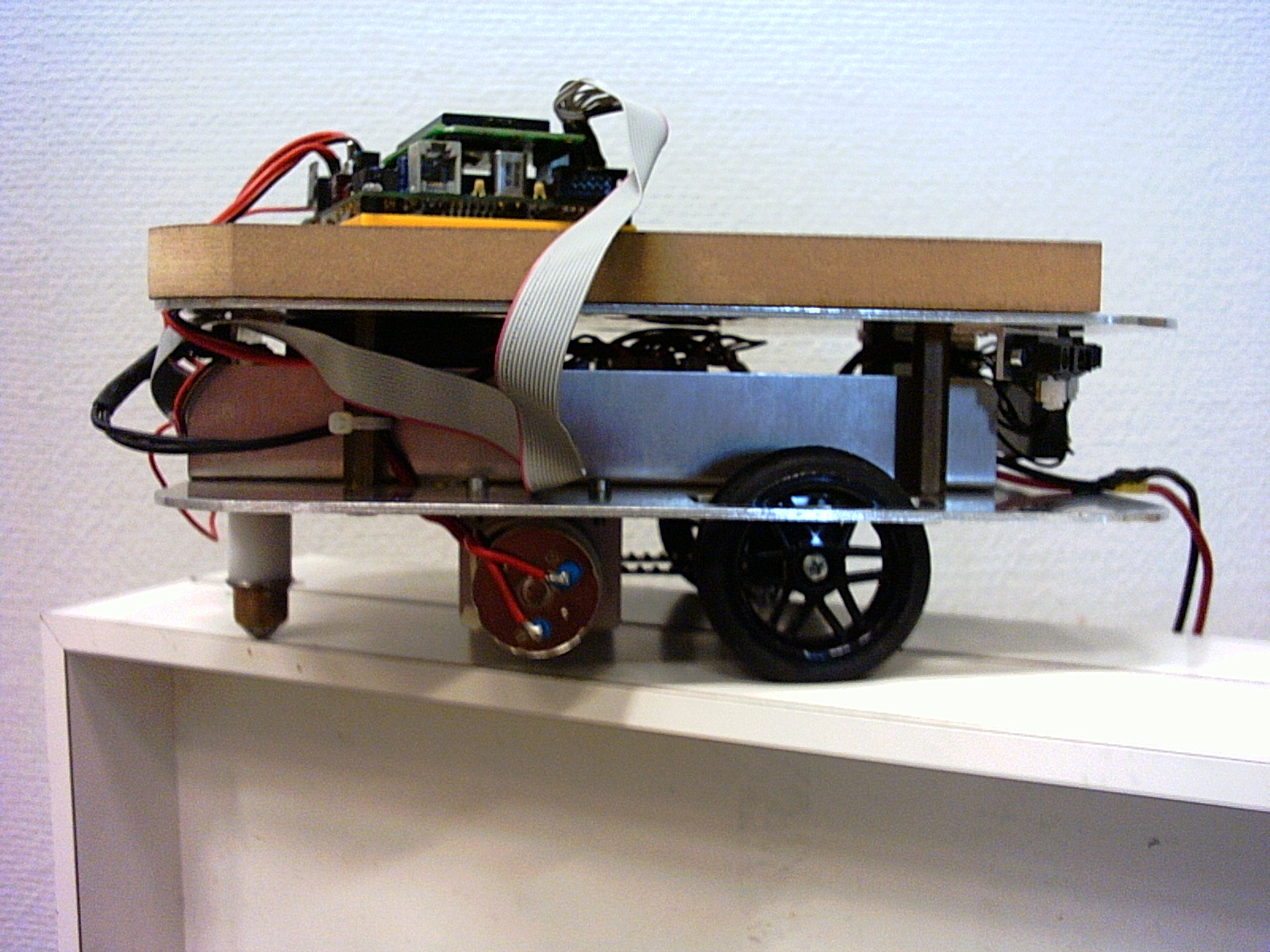
Roboterplattform von der Seite
zu sehen sind die zwei Aufbauebenen
mit aufgesetztem Aksen-Board
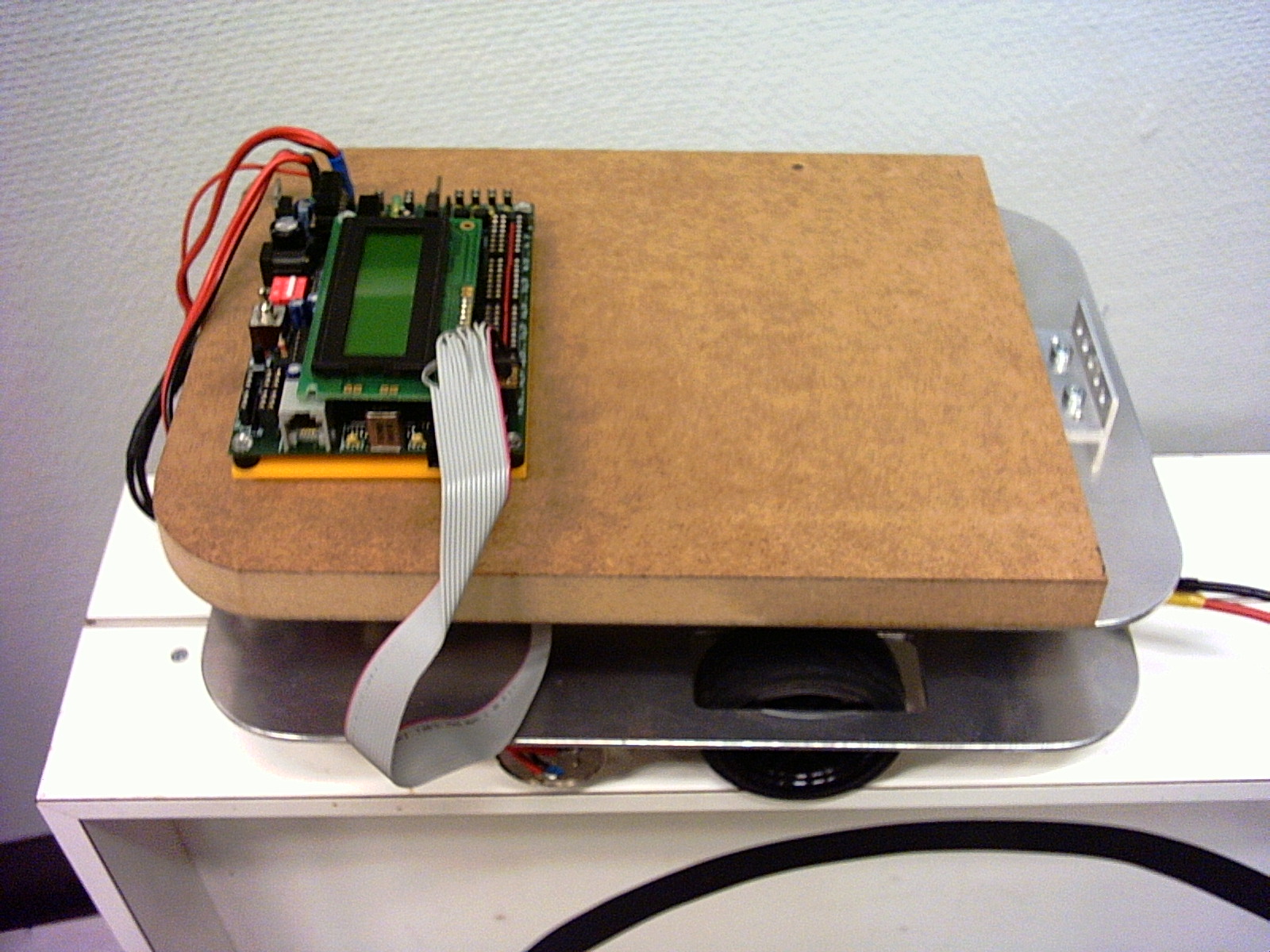
Roboterplattform von oben mit Steuerung
zu sehen ist die oberste Trägerplattform mit aufgesetztem Aksen-Board
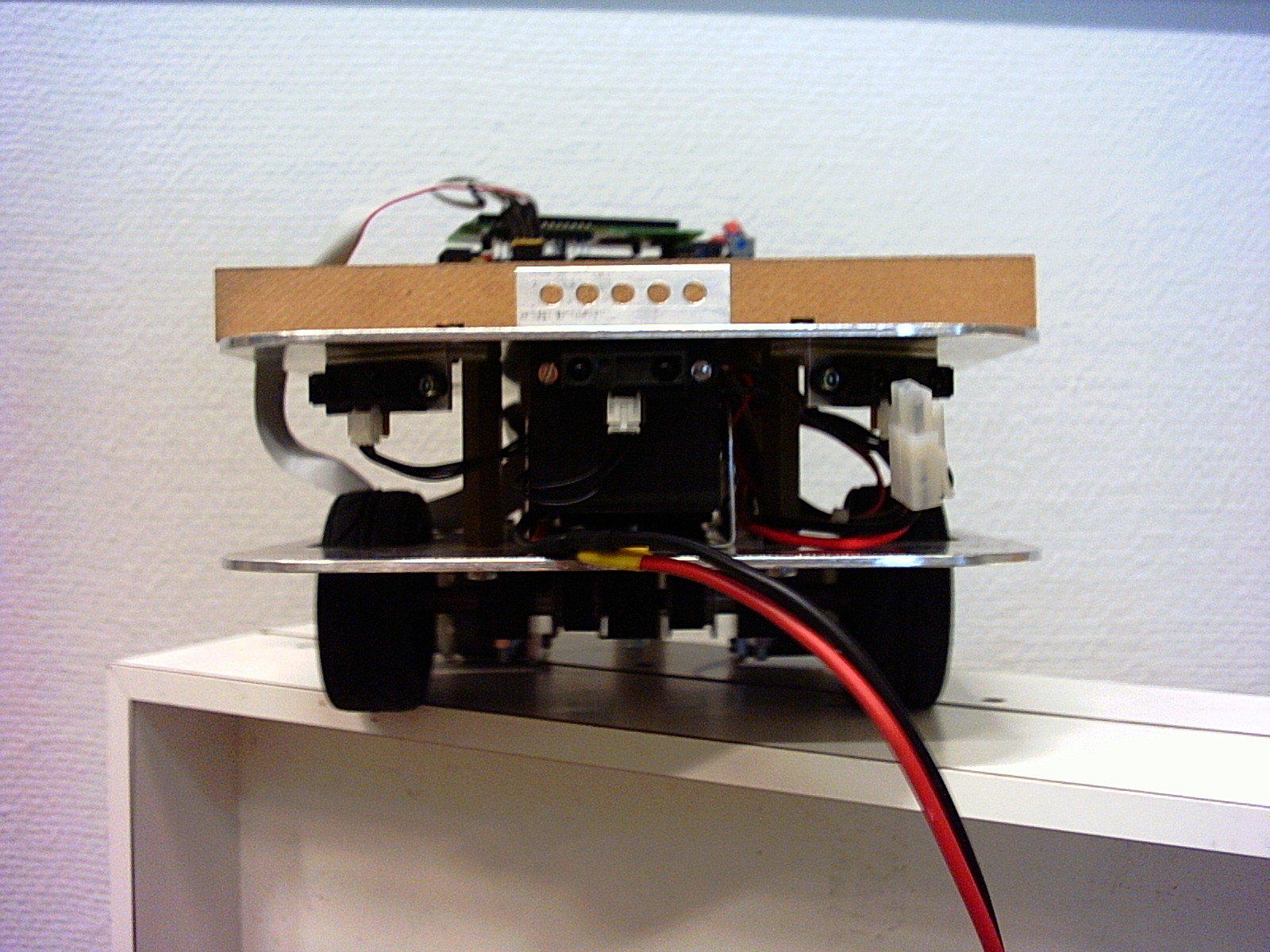
Roboterplattform von vorne
zu sehen sind die Trägerplattformen mit den vier Sensorträgern