Robot 2: Hansebot
 |
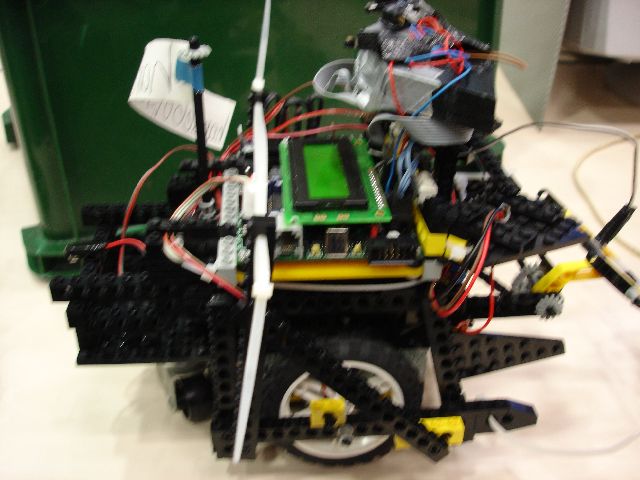
Nach mehreren Versuchen haben wir uns für einen Direktantrieb mit Untersetzung entschieden. Der Sitz der Motoren in unmittelbarerNähe der Achse ermöglicht eine sehr kompakte Konstruktion, die einfache Mechanik mindert Reibungsverluste. Die Untersetzung verringert zwar die Endgeschwindigkeit ein wenig, stellt aber ein höheres Drehmoment sicher. |
 |
Der Greifer wird mittels eines einzelnen Servos über eine Kette bewegt. Der mittlere, starre Teil dient auch als Schußvorrichtung. Die Kabelbinder verhindern ein seitliches wegrollen des Balles. |
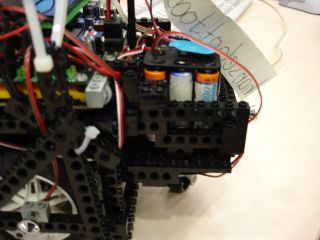 |
Die Akkumulatoren stehen in einer nach oben offenen Einfassung, so sind sie leicht zugänglich. Durch ihre Position ganz am Heck stellen sie das notwendige Gegengewicht zur Greiferkonstruktion und mindern Kippbewegungen beim Abbremsen. |
 |
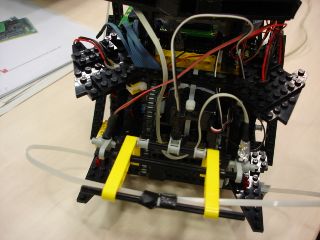
Da es uns nicht machbar schien, einen Tischtennisball fest und zugleich reibungsarm mit dem Roboter zu verbinden, haben wir uns für ein kugelgelagertes Pendelrad entscheiden. Das lange waagerechte Bauteil verhindert ein seitliches abspringen der Räder. |
*»viele« ist eine beliebige natürliche Zahl n, für die gilt: n > 3