
 Torsensoren
TorsensorenBallsensoren
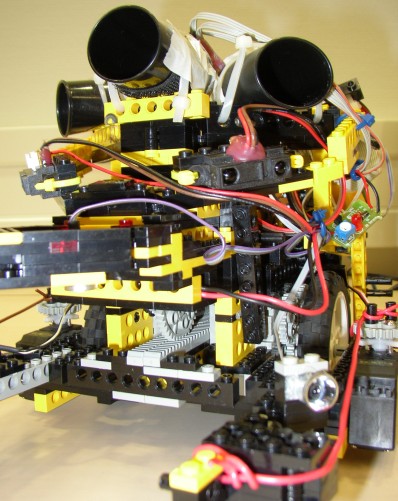
Im oberen Bild sieht man links und rechts jeweils einen
Sensor, mit einem Trichter abgedeckt, durch einen Legostein mit Loch
gesteckt und mit
Heißkleber befestigt. Einer befindet sich in der
Mitte direkt über dem Ball, falls dieser in den Bereich der
Greifer rollt. Er darf jedoch nicht zu niedrig sitzen, denn so
vergrößert sich die Chance, daß der Ball aufgrund
ungünstiger Lage (keine LED zeigt in die passende Richtung)
überhaupt nicht gesehen wird.
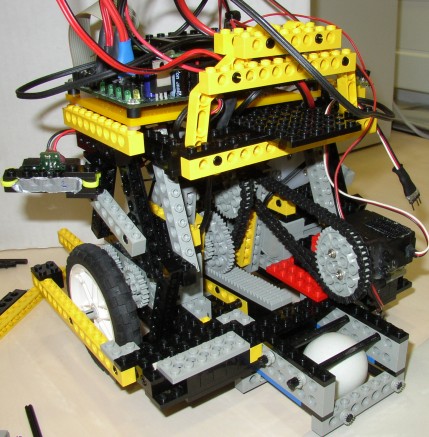
Auf dem unteren Bild ist hinter dem Mittelsensor die 'Phalanx' zu
sehen, bestehend aus vier Sensoren auf einer kleinen Platine und
deutlich empfindlicher als die Seitensensoren. Wenn man auf
waagerechte
Lage achtet, ist damit der Ball normalerweise über das gesamte
Spielfeld zu orten.
Wir haben zur Abschattung ein Legoteil mit Löchern verwendet und
dahinter ein schwarzes, durchgängiges Teil benutzt. Auch in diesem
Fall brachte ein rückwärtiger Sensor eher geringe Vorteile.
Servomotoren
Links und rechts an den Greifern zu sehen. Ein weiterer Motor wurde
für die Schußvorrichtung verbaut.
Es ist aber dringend davon abzuraten, mehr als einen Servo zu benutzen:
wir waren das einzige Team mit so einem Konzept und hatten reichlich
Probleme damit. Wenn ein Servomotor 'anschlägt' bzw. blockiert
wird und nicht zur vorgesehenen Position drehen kann, zieht er Unmengen
von Strom und das System kommt völlig zum Stillstand. Man
beschränkt sich also am besten auf einen Servo und benutzt eine
von oben herunterklappende Greifvorrichtung, mit der dann auch
gleichzeitig geschossen werden kann (elastischen Bogen mit Kabelbindern
bilden). Ohnehin reagieren die Servomotoren
zu langsam für Greifer, wie wir sie realisiert haben und lassen
den Roboter den Ball oft nicht erfolgreich fassen.
Rahmenkonstruktion
Es gibt einige wichtige Punkte bei der Konstruktion des
Gestells zu beachten. Mehrere Teams, so auch wir, mußten nach
einiger Arbeit von Grund auf neu anfangen, weil sie nicht bekannt waren.
Zum einen muß der Roboter stabil genug sein, um sich im
Wettbewerb, bei dem es mechanisch schon mal zur Sache gehen kann, nicht
in seine Einzelteile zu zerlegen. Zum anderen muß er
möglichst leicht bleiben, denn Geschwindigkeit ist ein sehr
wichtiger Faktor. Außerdem sollte er möglichst wenig
Möglichkeiten für ein Hängenbleiben oder Verhaken mit
dem anderen Robot bieten.
Auf dem letzten Bild ist unser erster Versuch zu sehen. Die Probleme im
Einzelnen:
Die Gewichtsverlagerung trieben wir etwas zu weit - beim neuen
Roboter war das Gewicht nun auf den Seitenrädern bedenklich hoch,
deren Mantel übrigens zu weich ist und eventuell ausgestopft
werden sollte.
 Allgemein
Allgemein
Da der Zugriff auf das LCD des
Aksen-Boards recht viel Zeit kostet und es beim fahrenden Robot
schlecht abzulesen ist, bietet es sich an, LEDs zur Anzeige bestimmter
einfacher Informationen (z.B. Ball rechts oder links erkannt) zu
benutzen.
Statt mit Akkus kann auch mit Batterien gefahren werden. Die
höhere Spannung voller Zellen (1,5 statt 1,2V) macht aber meist
eine Anpassung des Programms erforderlich, da beispielsweise Drehungen
hin zum Ball oder Tor nun schneller ausgeführt werden und somit
deren Dauer verkürzt werden muß. Ansonsten würde die
Richtung überkorrigiert.
Bei aller Flexibilität, die die Auswahl der Hardware liefert: wer
vom Grundprinzip KIS (keep it simple) abweicht, sollte besser sehr
genau wissen, was er tut. Der hier zu sehende extravagante Aufbau mit
Schußvorrichtung und motorisierten Greifern war
schlußendlich nur mit Mühe zum Laufen zu bringen.
Eine einfache Konstruktion läßt mehr Zeit für
Feinheiten, die im Wettbewerb den entscheidenden Unterschied machen
können.
Weiter zu Teil 2: Software