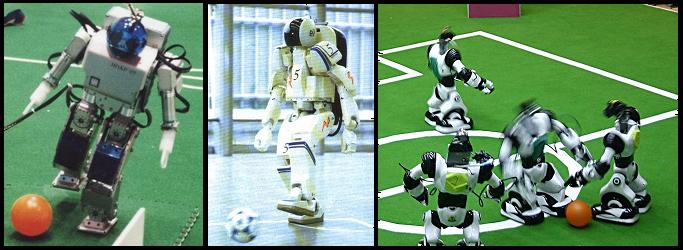
Normaler Weise spielen im Roboterfußball mobile Multi-Agenten-Systeme kooperativ und koordiniert in einer dynamischen Umgebung zusammen. Sie teilen Aufgaben untereinander auf, und agieren autonom.

Bei der Software-Strategie haben wir uns an Rodney A. Brooks gehalten und ein reaktives System mit einer Subsumption Architektur implementiert.
Reaktiv
Reaktiv bedeutet in diesem Zusammenhang, dass die Daten der Sensoren direkt die Steuerung des Robotors bedingen. Es werden keine Daten wie z.B. Positionen gespeichert.
Dies bedeutet, dass die Sensordaten zuverlässige Werte liefern müssen. Diese sind aber abhängig von Faktoren aus der Umgebung. So kann unterschiedlicher Lichteinfall oder eine veränderte Temperatur unvorhersehbare Reaktionen auf die Umwelt verursachen. Auch die Batterieleistung ist ausschlaggebend.
In allgemeinerem Kontext bestehen reaktive Systeme auch häufig aus nebenläufigen Prozessen, die - wie auch bei uns - oftmals nicht terminieren.
Subsumption
Diese von Brooks entwickelte Architektur ist hervorragend für ein reaktives System wie unseres geeignet:
Unser Roboter hat zu unterschiedlichen Zeitpunkten verschiedene Ziele, die sich in der Priorität differenzieren.
Zum Beispiel muss er bei der Ballsuche neben dem Ball auch die Wände beobachten. Wenn er sich festfährt, ist der Ballsensor nicht mehr wichtig. Zuerst muss sich der Roboter von der Wand entfernen.
Die möglichen Verhaltensmuster werden also berechnet und das anzuwendene aufgrund der Prioriät ausgewählt.
Diese Berechnungen erfolgen in Echtzeit während sich die Umgebungsbedingungen fortlaufend ändern. Dabei muss der Roboter mit stark verrauschten Signalen seiner Sensoren unmgehen.
Das Problem mit dem Umgang mehrerer Fehleranfälliger Sensoren fällt aber eher in den Bereich der Überlegungen von Dempster/Shafer.
Subsumption bedeutet auf Deutsch Ein- /Unterordnung. Dies wird aus folgendem Diagramm erkenntlich.
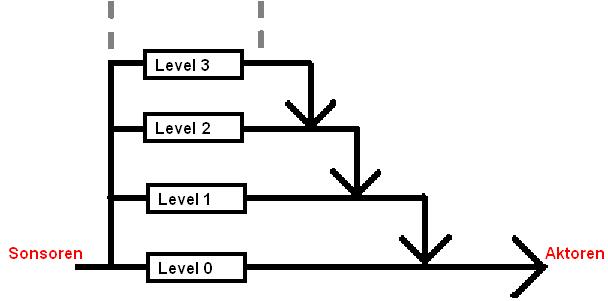
Das Beispiel von oben wäre eine Architektur mit zwei Ebenen. Die Ballsuche auf Ebene 1 und die Kollisionsvermeidung auf Ebene 0.