Projekt Yoberd
Mit freundlicher Unterstützung des Hohen Rates der Jedi.
Das Konzept
"Hmm ... wie gehen wir nun vor?"
"Oh, sieh mal, mein Schlüsselanhänger!"
"Alles klar, das wichtigste haben wir ... den Fahrer.
Der erste Versuch
Nach ersten Spielereien um herauszufinden, wie das Aksenboard bedient wird, entstand ziemlich schnell der erste Prototyp.
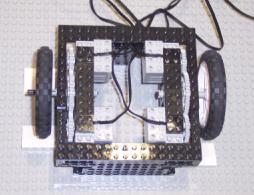
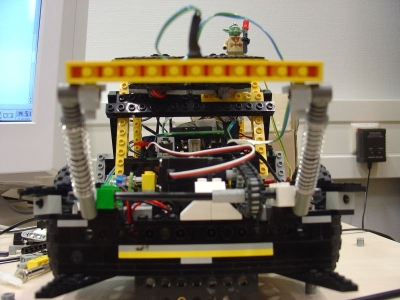
Das unglaublich stabile Fahrwerk
Der erste Prototyp. Das Board liegt hinten im Kofferraum. Die Akkus liegen zwischen den Rädern,
um darauf das Hauptgewicht zu verlagern. Die erste Aufgabe - das Spielfeld abfahren ohne anzustoßen -
hat er mit Bravour gemeistert.
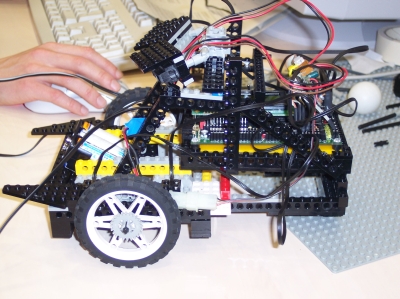
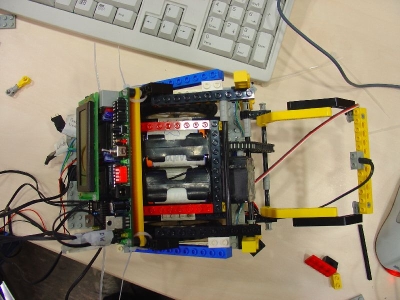
Für die zweite Aufgabe - das Suchen des Balls - wurde der Prototyp um die Ballsensoren erweitert.
Natürlich sind sie hier noch nicht an ihrer endgültigen Position. Doch dafür hat es gereicht.
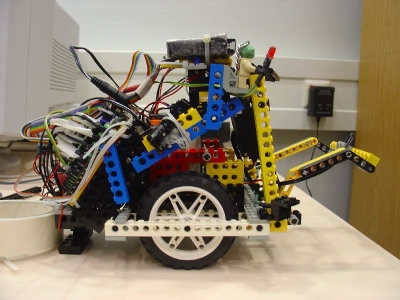
Das engültige Ergebnis des ersten Prototyps. Hier schon mit Ballfangvorrichtung.
An dieser Stelle stießen wir das erste mal auf ein ernsthaftes Problem:
Der gute Yoberd war viel zu langsam! Zu viel Gewicht lagerte auf unserem "Hinterrad".
So konnte er das Tor nicht mal auf 30 cm Entfernung treffen!
Das dokumentierte Disaster (8,8 MB, MPG)
Unsere Lösung für das Problem: Komplettes Redesign!
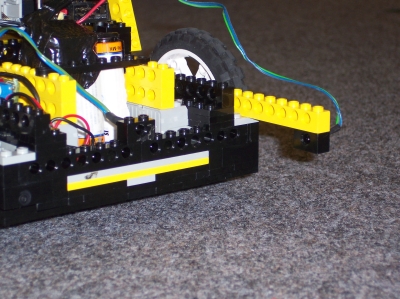
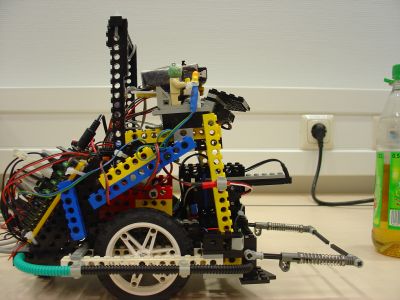
Der zweite (und finale) Versuch
Diesmal etwas kompakter, andere Umsetzung und bessere Gewichtsverteilung auf die Räder.
Außerdem kamen wir nun ohne größere Umbaumaßnahmen an die Akkus heran und der Greifkäfig funktionierte besser.
Jetzt konnte der gute Yoberd sogar das Tor treffen!
Hier der Beweis (3,7 MB, MPG)
Allerdings immer noch mit einer alten Version des Greifarms - es kamen noch viele weitere - mit Kette.
Das Problem bei dieser Version: Wir wollten den Greifarm auch zum Schießen benutzen, was mit diesem
Aufbau nicht wirklich möglich war. Der Ballsensor am Greifarm hat bewirkt, dass der Ball immer nach links
oder rechts abgedrifftet ist.
Ein andere Version des Greifarms, die wir schamlos nicht dokumentiert haben, konnte zwar gut schießen, aber dafür
stießen wir auf ein anderes Problem:
In Testspielen haben wir festegestellt,
dass der gegnerische Roboter gerne mal auf unseren Greifarm gefahren
ist, wenn er gerade unten war. Als der Greifarm dann wieder hochgedreht wurde,
verabschiedete sich entweder die Kette oder das Zahnrad am Greifarm blieb stehen,
während sich das am Servo weiterdrehte. Ganz fieses Geräusch!
Lösung dieses Problems: So richtig haben wir keine ... aber wir haben die Kette durch direkte Zahnradübersetzung
ersetzt und den Servo in einen Legokäfig gesperrt und diesen mit Kabelbindern fixiert, bis das Material vor
Schmerzen gestöhnt hat. Nun tritt oben genannter Effekt nur noch in einem von vielleicht zehn Fällen auf.
Hier hält der Greifarm (7,3 MB, MPG)
Und noch ein Tor ohne Gegner (10,0 MB, MPG) mit der (fast) Endgültigen Version.
Weitere Bilder aus der Werkstatt von Yoda Mechanics Inc.
Noch mehr ältere Bilder und Videos gibt es auf der alten Seite.