 1.
Hardware
1.
HardwareChristian Kruse - HAW Hamburg
Hans-Gunter Lock - Hochschule
für Musik und Theater Hamburg
Kalev: Heldengestalt aus dem estnischen Nationalepos Kalevipoeg
1.
Hardware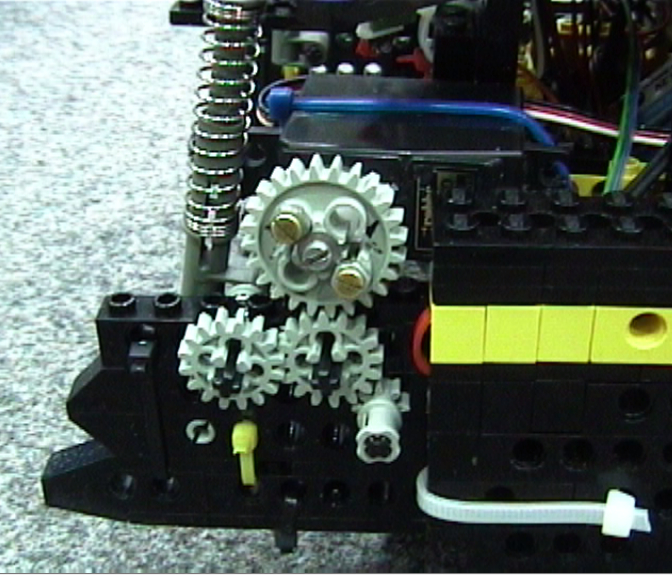
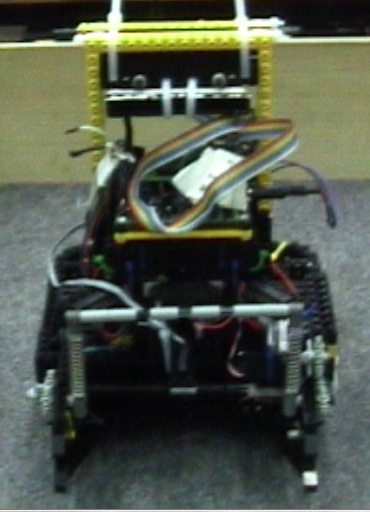
Ballkäfig aus gefederten
Lego-Elementen
Klappmechanismus via Servo über
Zahnradmechanismus
Zahnräder rasten aus bei Blockierung,
durch Anschläge justiert sich Mechanismus wieder zurück
drei passive IR-Ballsensoren, vordere
dreifach ausgeführt
drei aktive Sharp Abstandssensoren
(vorn, links, rechts)
drei IR-Torsensoren (vorn, links, rechts)
aus Legoelementen, mit Kabelbindern sind alle in Probeläufen sich lösende Einzelteile fixiert worden.
Aksen Board Kleincomputer
Endlosschleifen-basierte Programmierung
in C++ mit unterschiedlichen Funktionsaufrufen für
unterschiedliche Aufgabenstellungen:
cruise bewirkt das
Ausweichen an der Bande, wenn ohne Ball gefahren
wird
Balldetektion bewirkt das Auffinden des Balles durch die
Ballsensoren
Drehung zum Tor stets rechts herum, bei Blockade
(z.B. an Bande) wird nach einiger Zeit nach links
gedreht
Regelwerk erwirkt die Freigabe des Balles für eine
Sekunde im Abstand ca. 10cm gemäß der
Spielregeln
Torfahrt nach Drehung zum Tor fährt der Roboter
drei Sekunden mit geschlossenem Ballkorb in Richtung Tor, unter
Berücksichtigung von Kurskorrekturen
Tor schießen nach
Torfahrt fährt der Roboter mit offenem Ballkorb ein Stück
rückwärts um wieder vorwärts zu fahren, wodurch der
Ball ins Tor gestoßen wird
Wendigkeit, Schnelligkeit
Ballkorb,
daruch auch geringe Eigentorwahrscheinlichkeit
Roboter findet den
Ball zielsicher
fehlende Schießeinrichtung
wenige
Sensoren
keine Bumper für Kollisionsmeldungen
zeitweilige
Unsicherheit bei der Torerkennung