

|
|
|
|
|
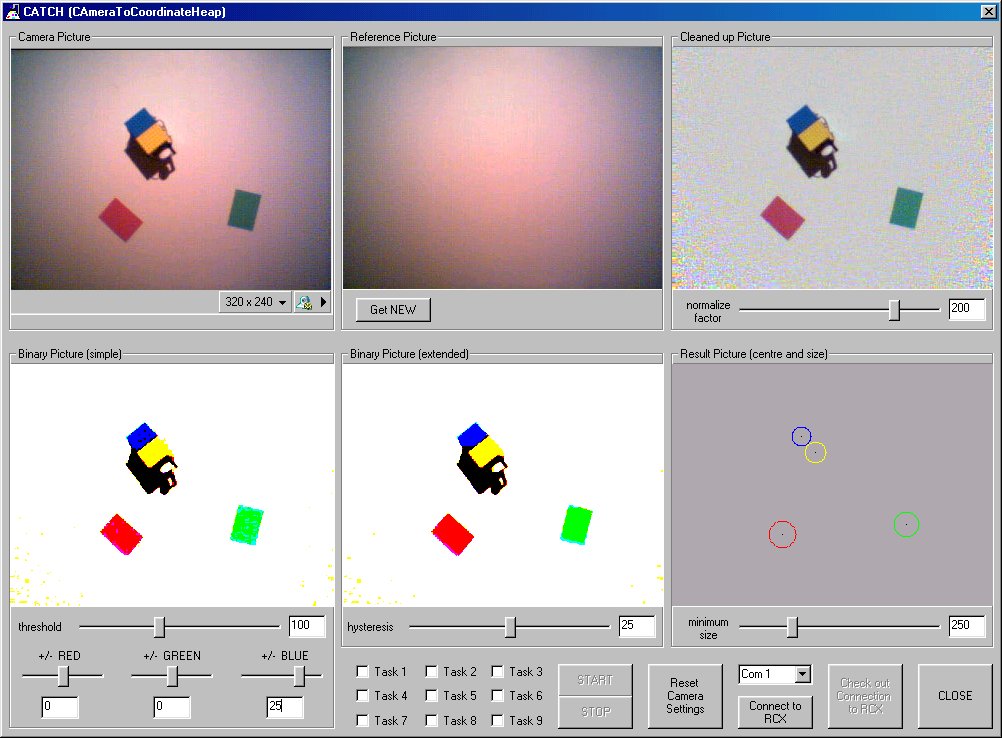
Hier kann man sich sowohl das Progamm als auch das Visual C++ 6.0 Projekt downloaden. Um zu verstehen welche Idee dieser Software zugrunde liegt, sollte man die Diplomarbeit (wenigstens teilweise) oder die Datei LiesMich.pdf gelesen haben. |
|
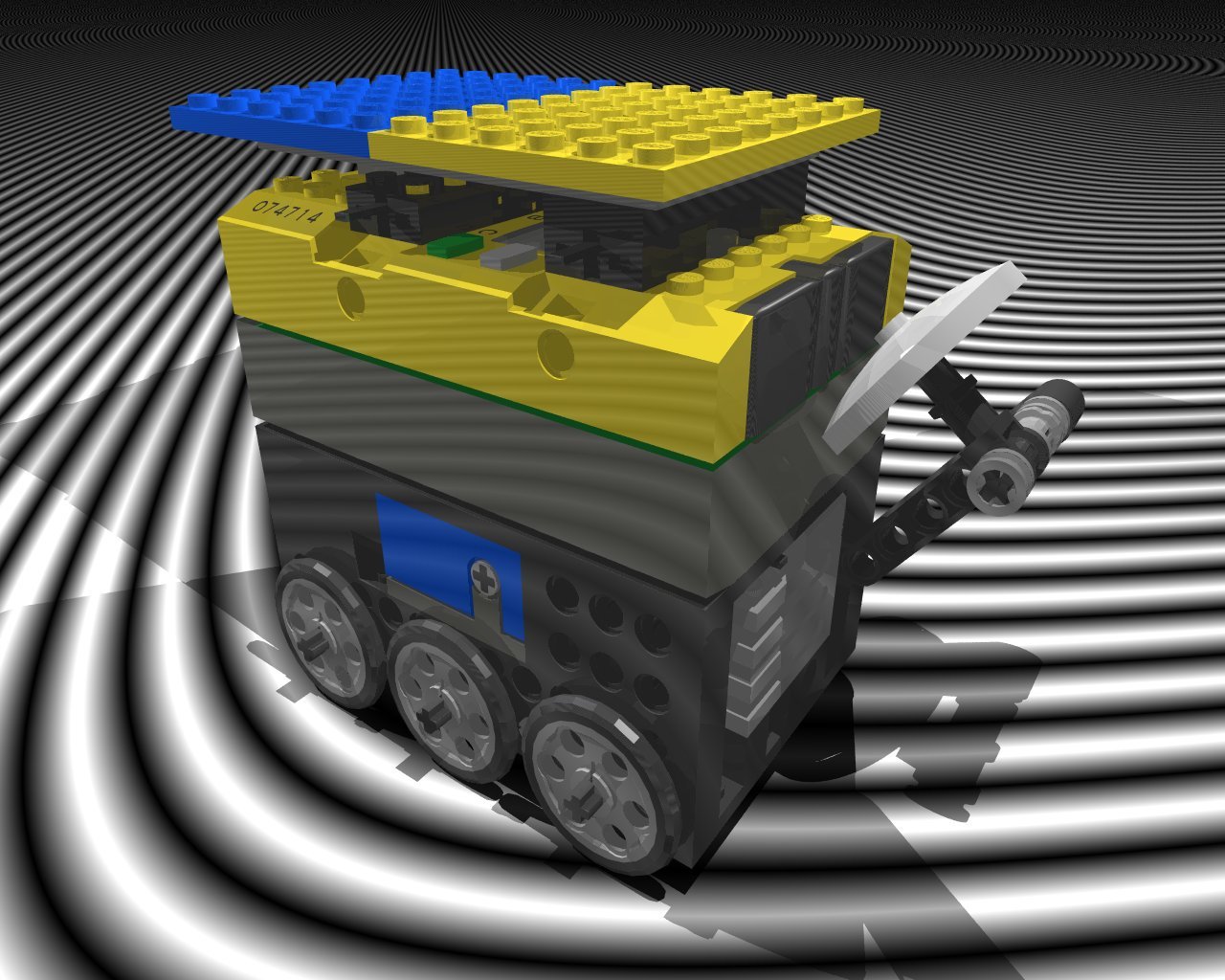
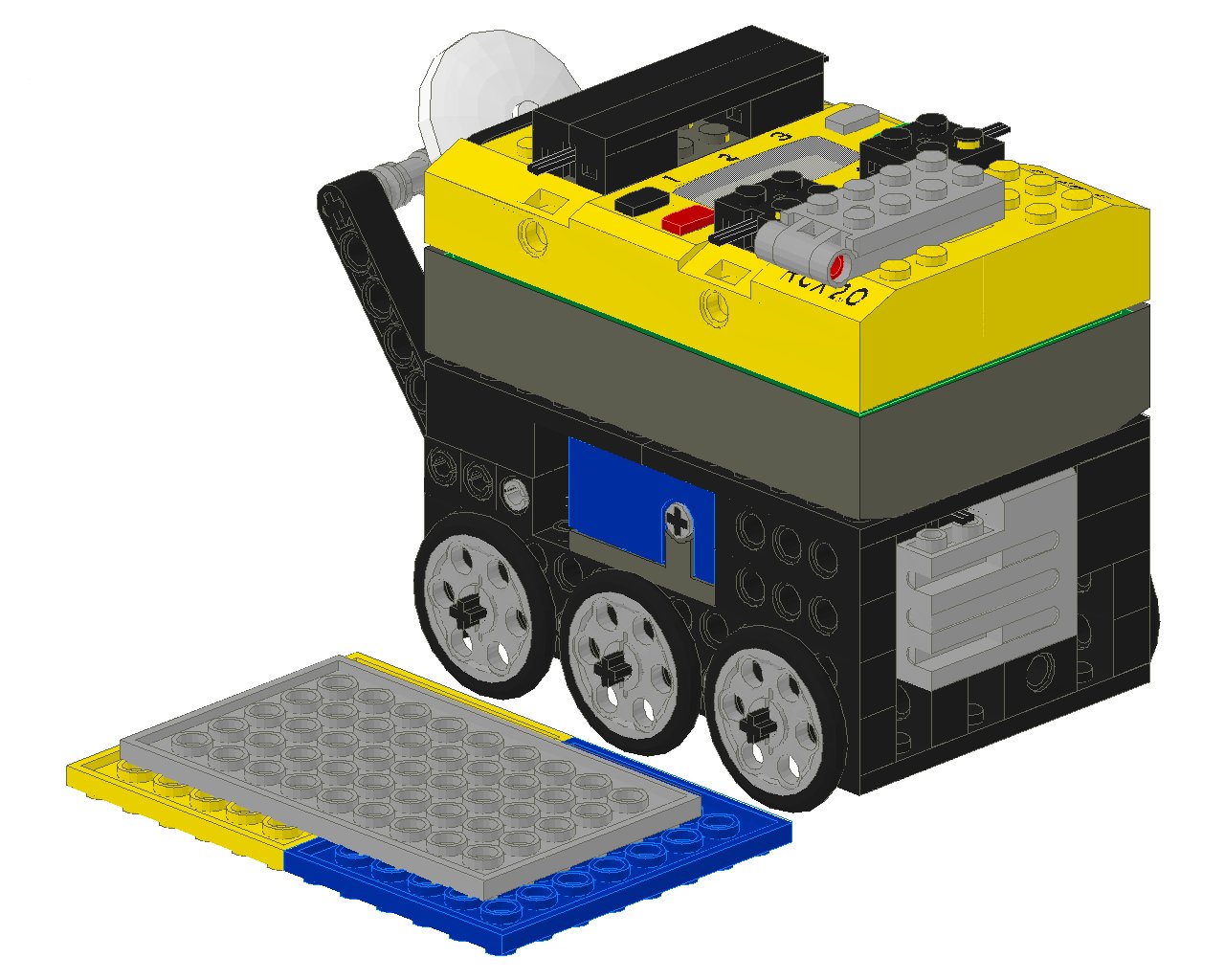
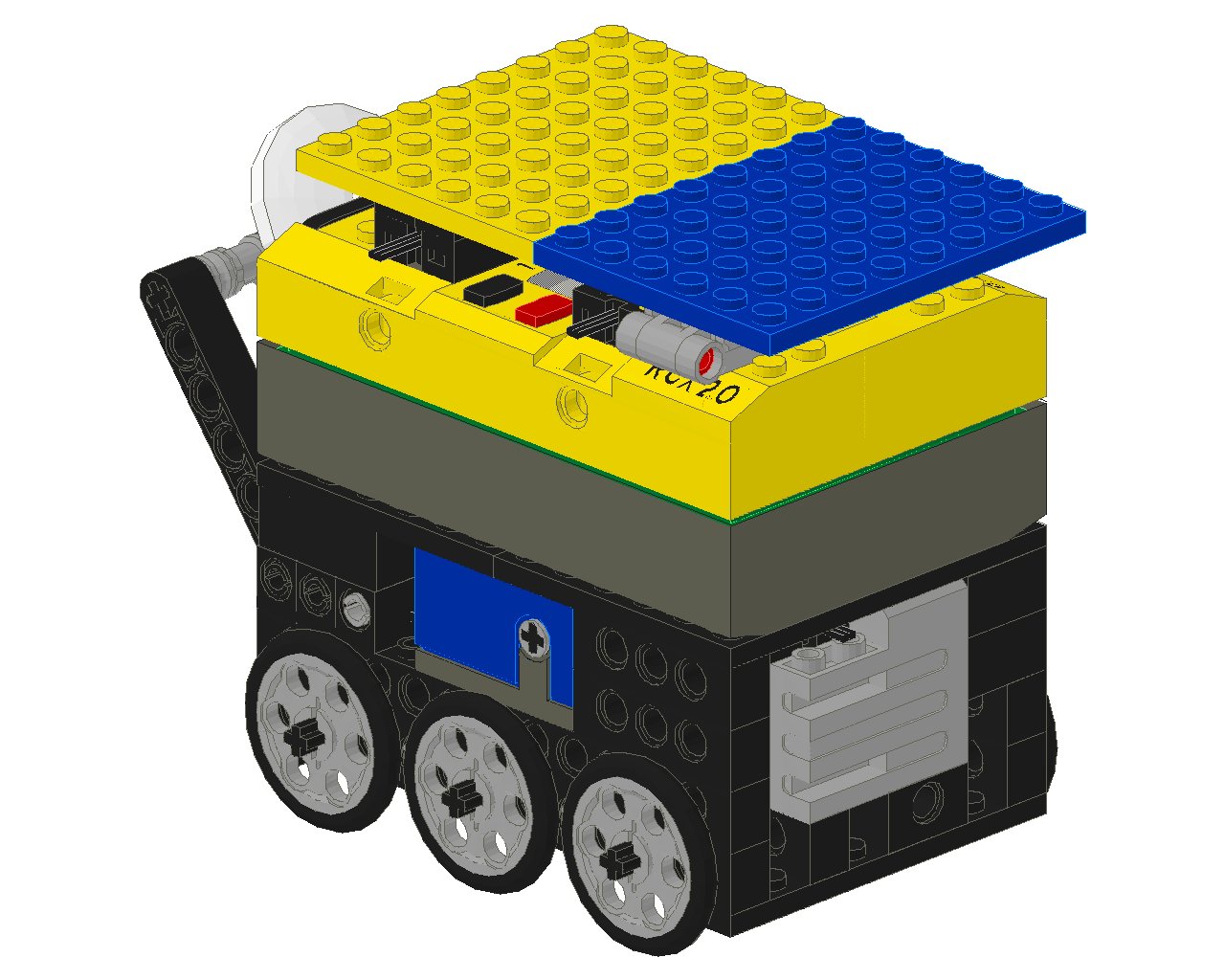
So sieht der von mir im Rahmen der Diplomarbeit erstellte Roboter aus. Weiter unten ist eine ausführliche Bauanleitung des Roboters zu finden. Wer lieber ein MLCAD Modell haben möchte findet dieses hier. Das Program auf dem Roboter ist mit NQC geschrieben und kann hier gedownloadet werden. |

|
Diplomarbeit als PDF (7 MB). |
|
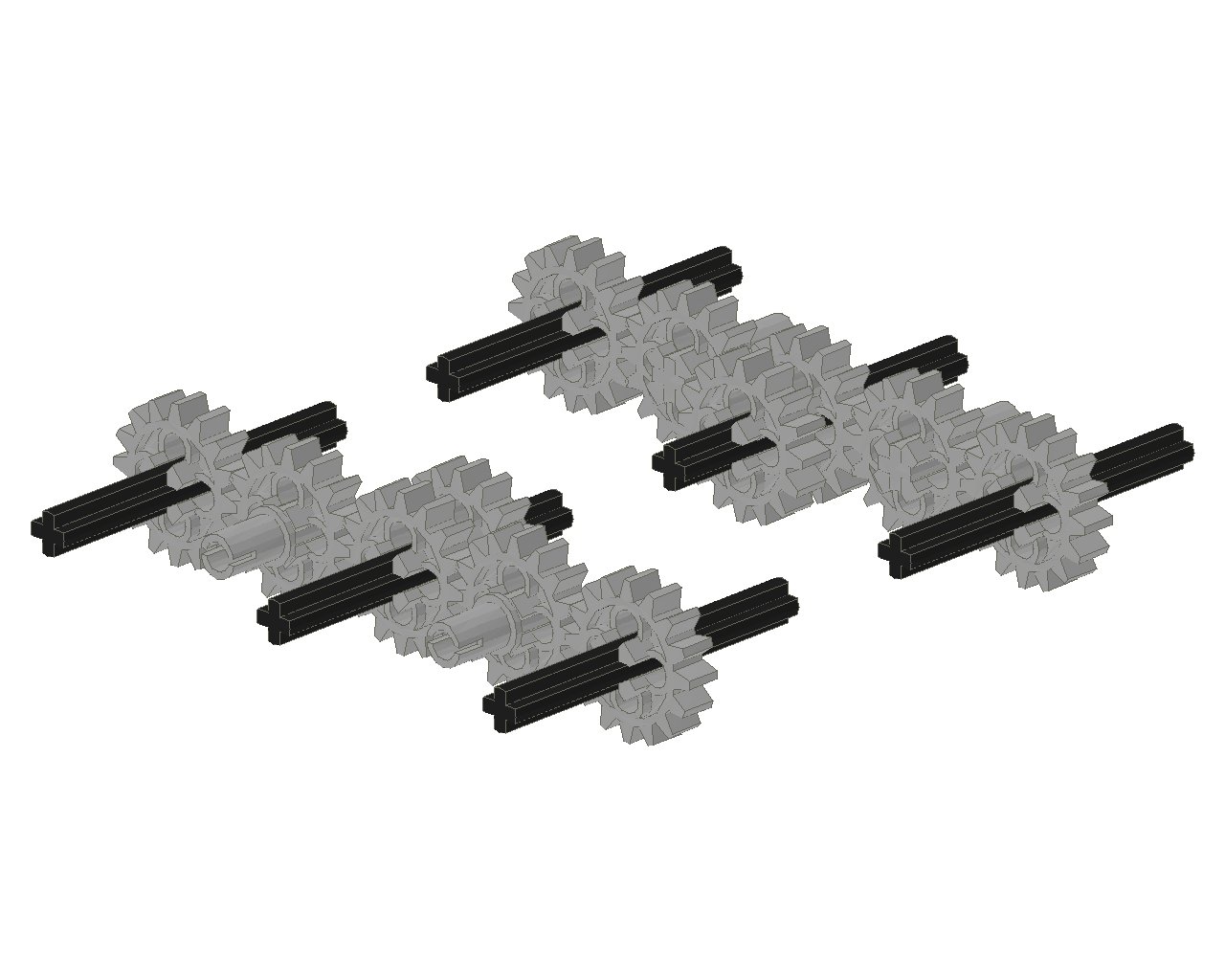
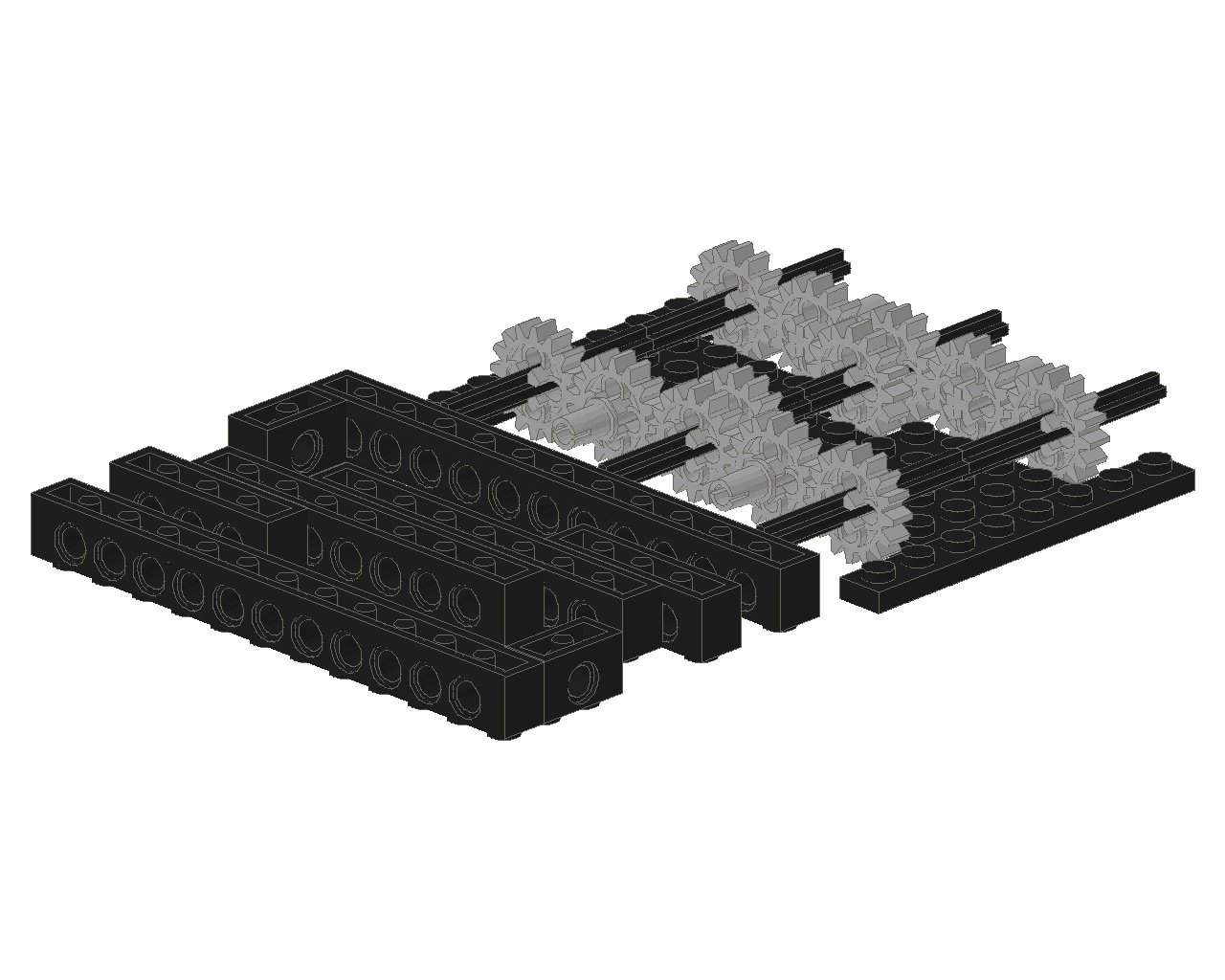
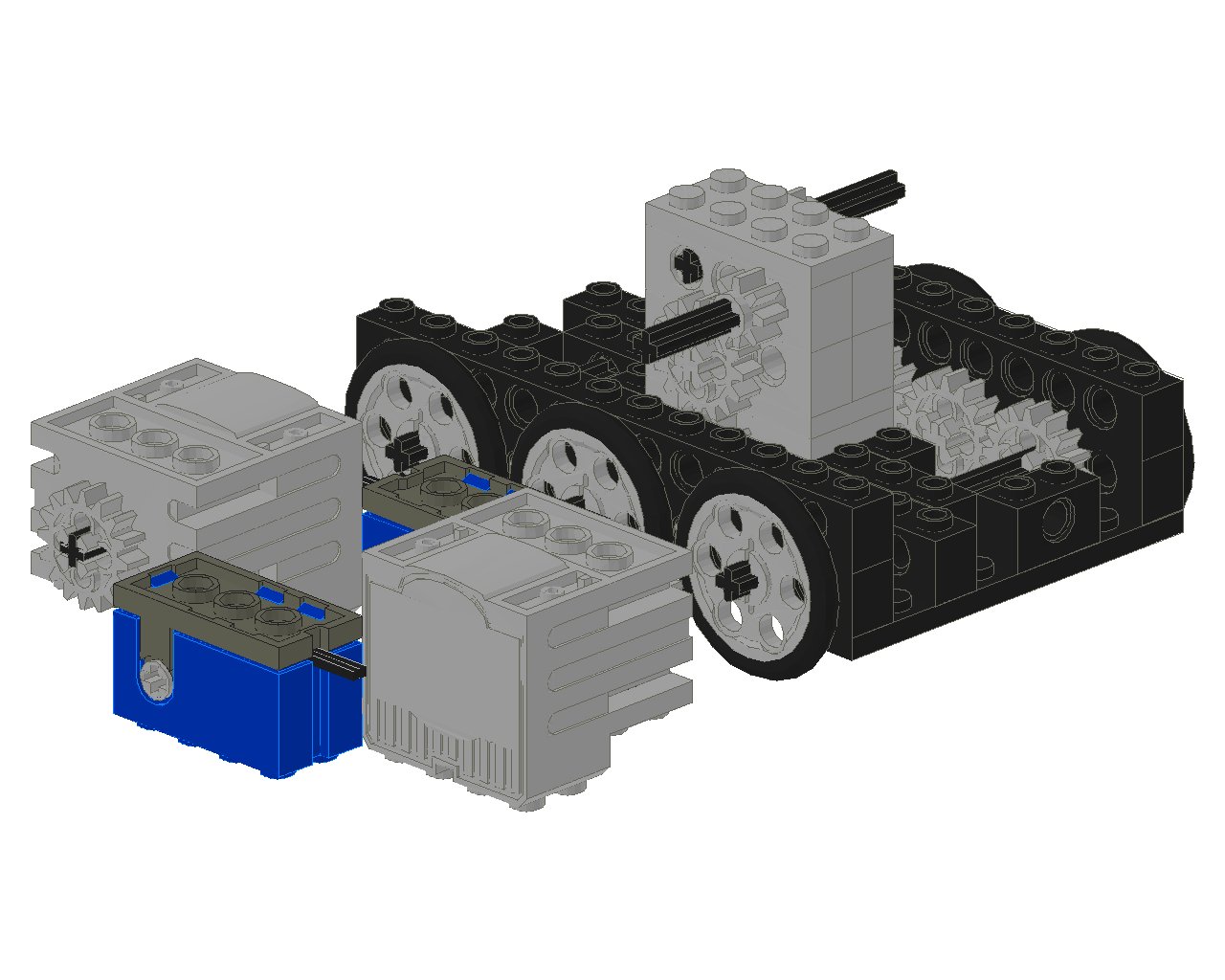
Bauanleitung Teil 1 |
|
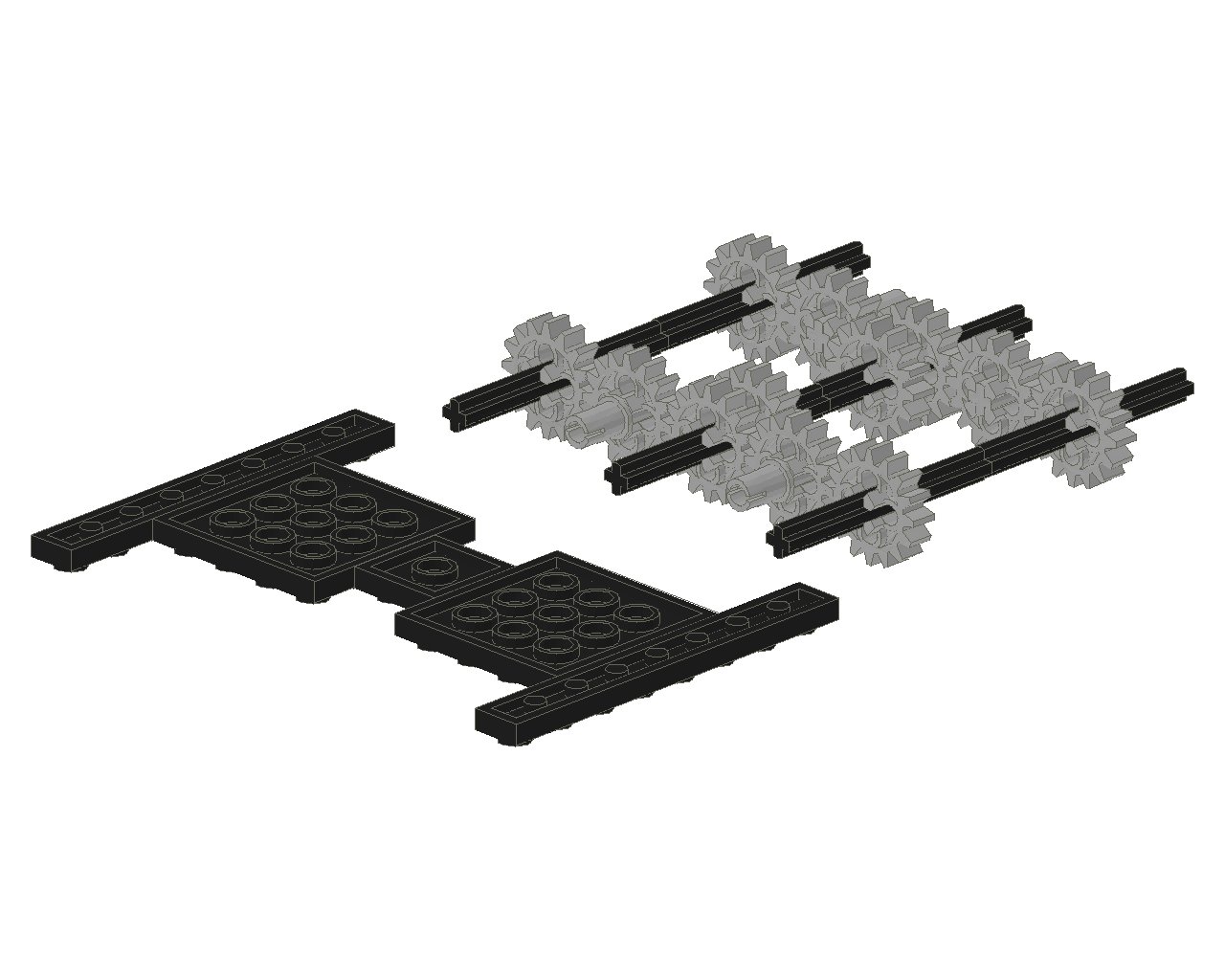
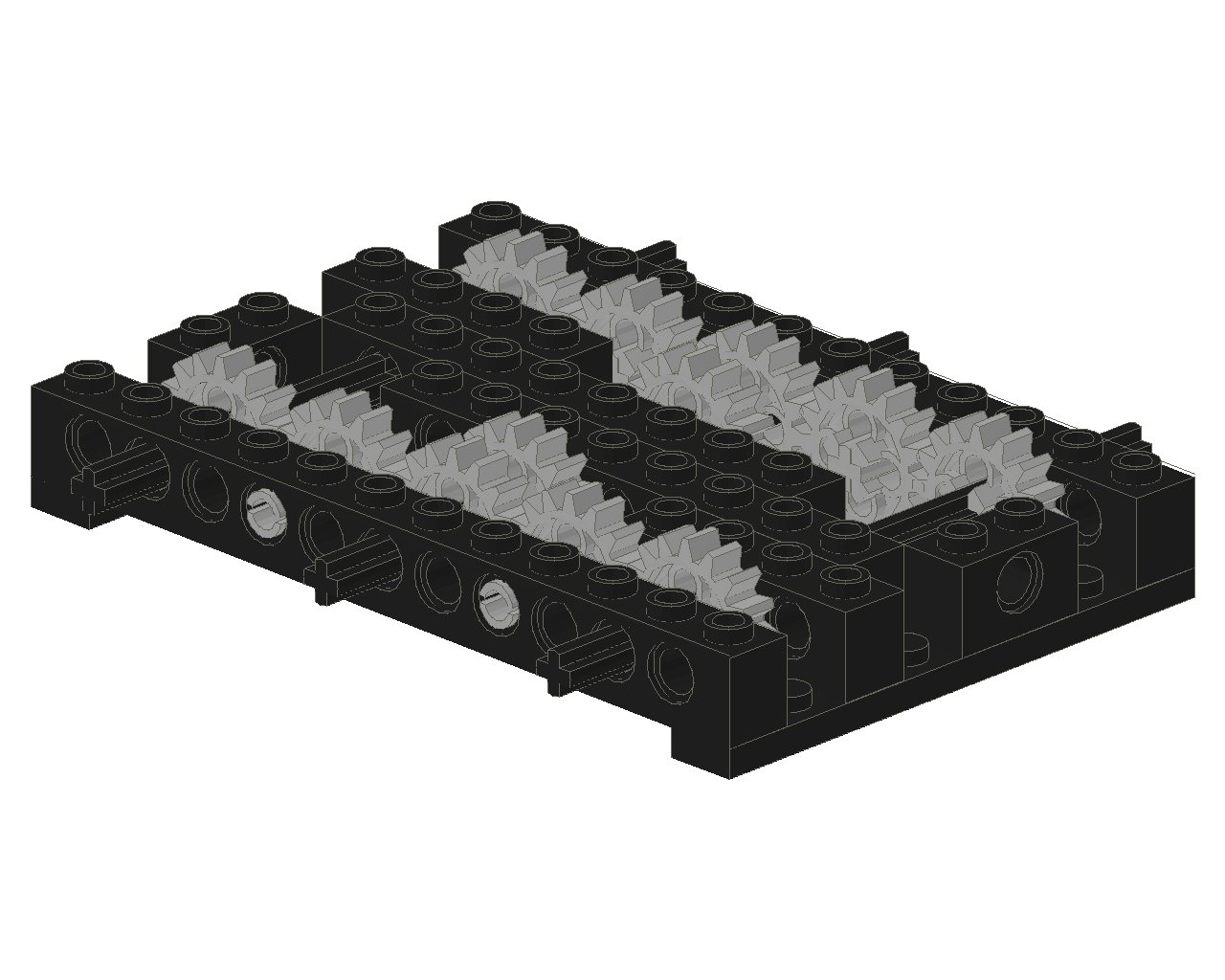
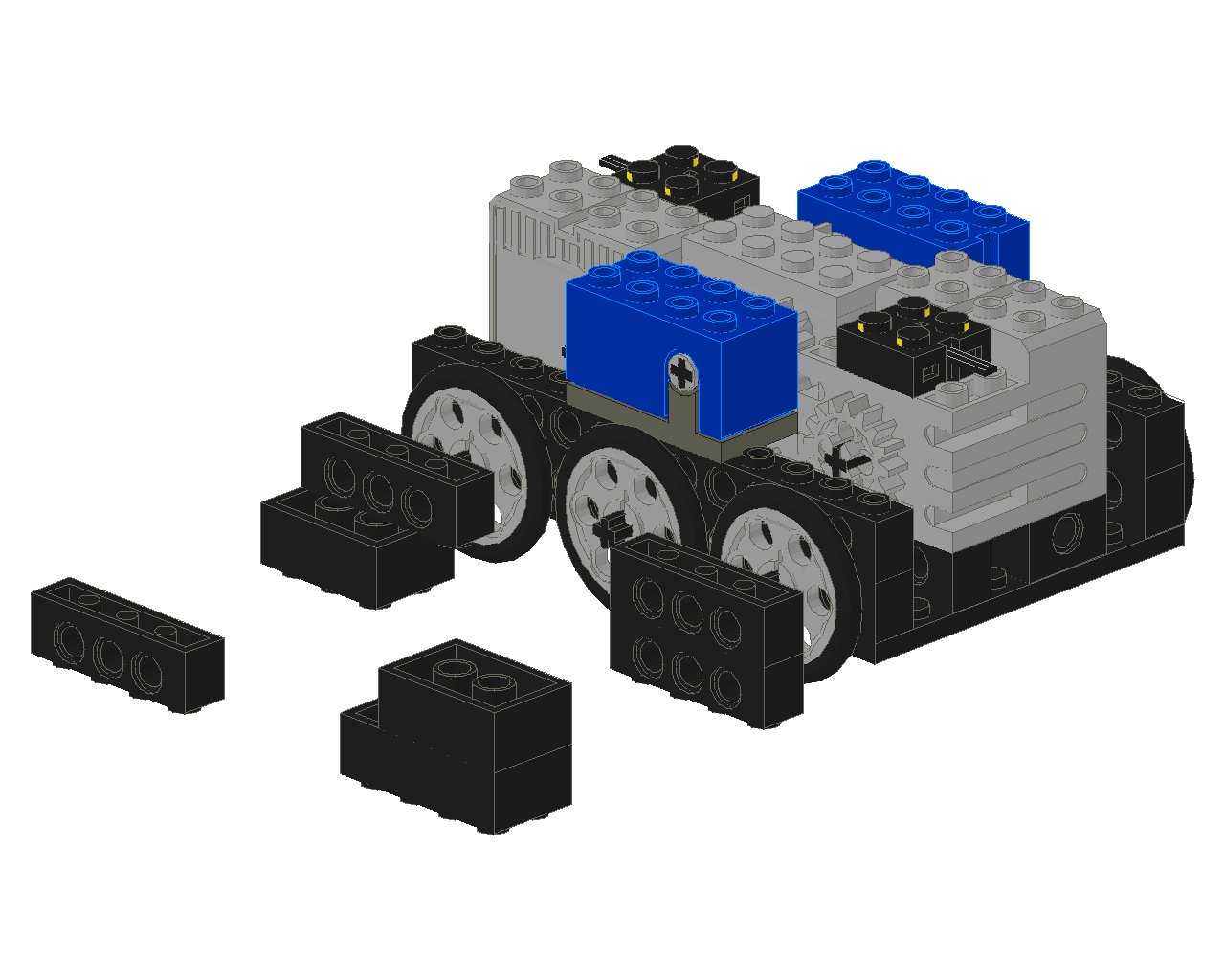
Bauanleitung Teil 2 |
|
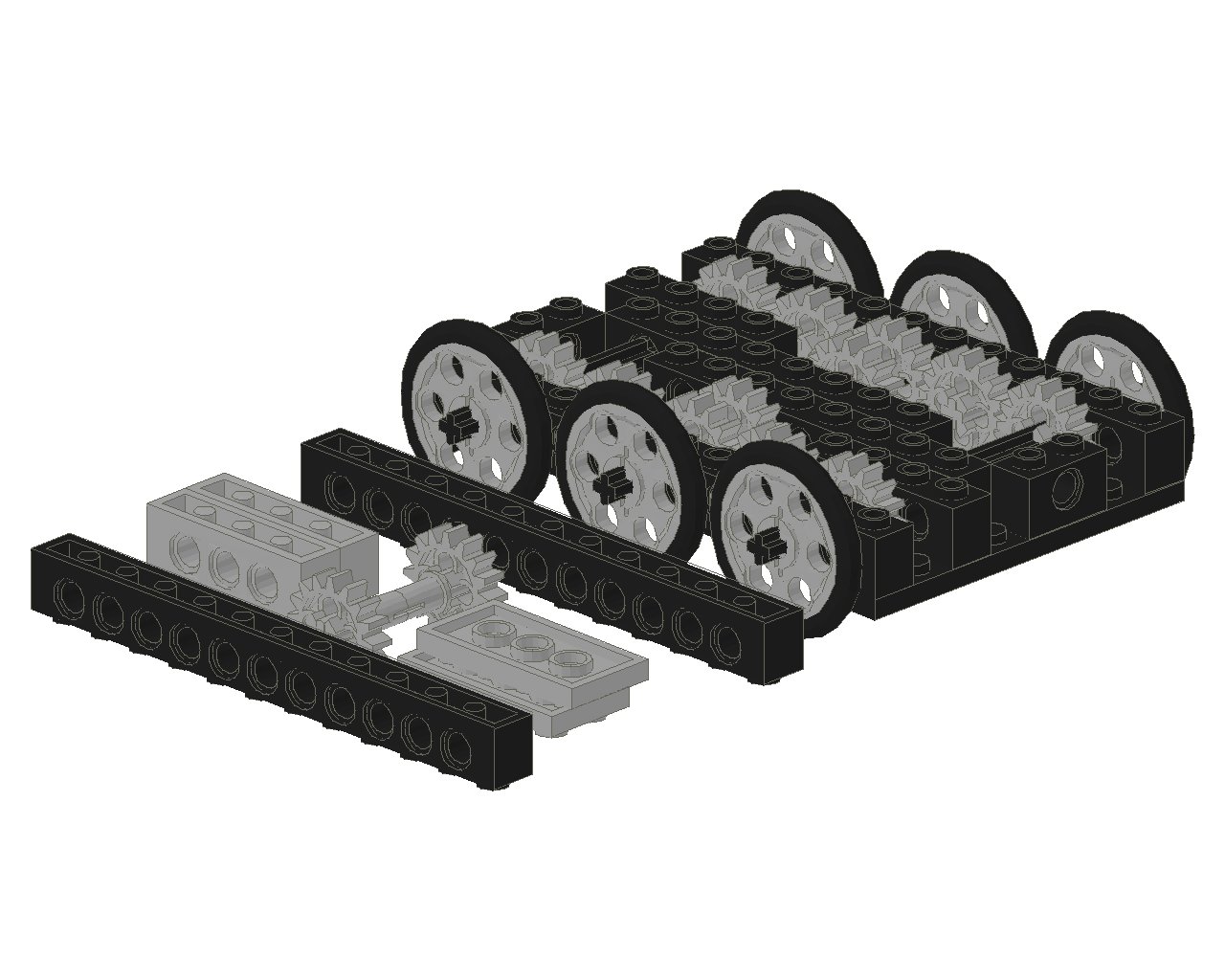
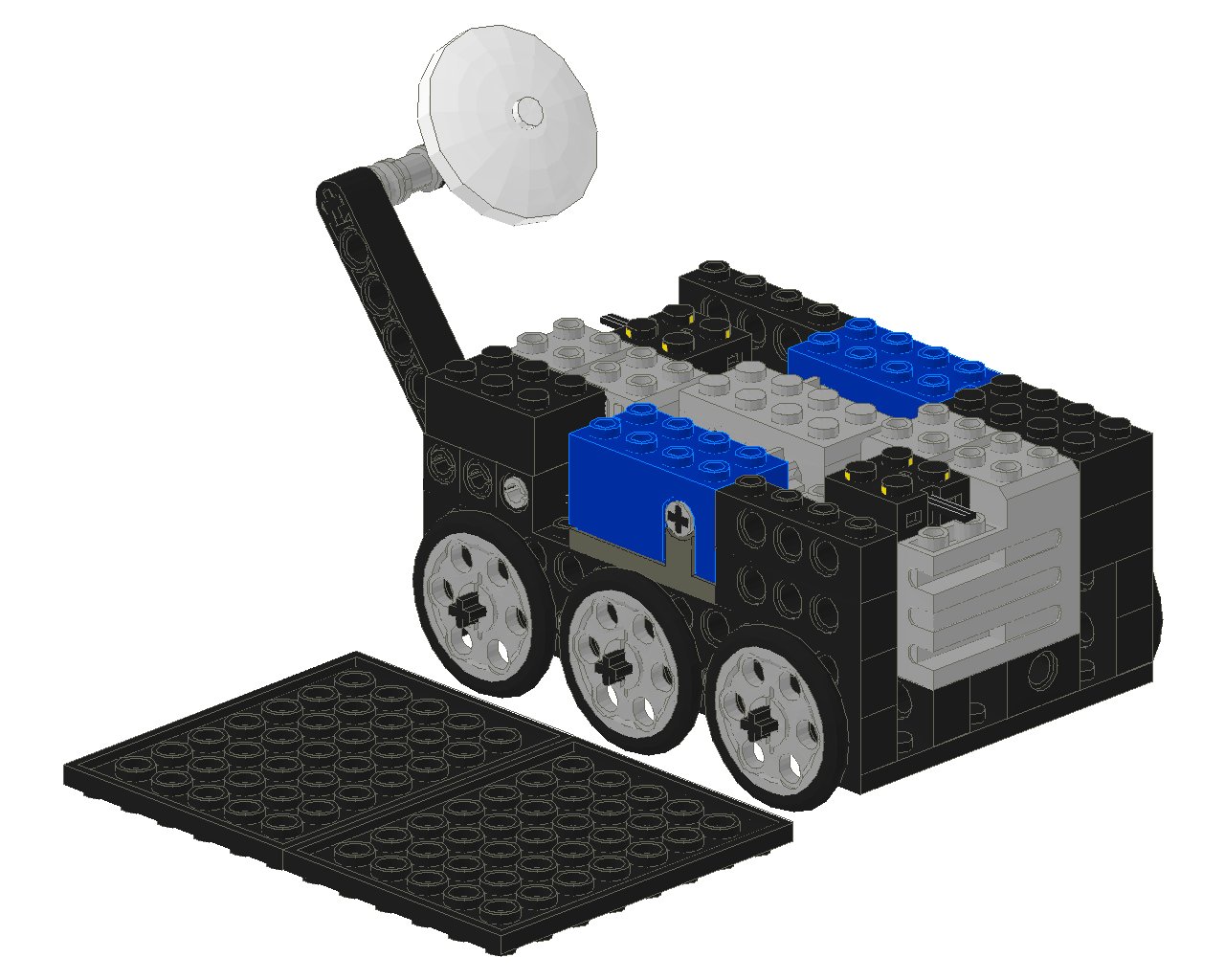
Bauanleitung Teil 3 |
|
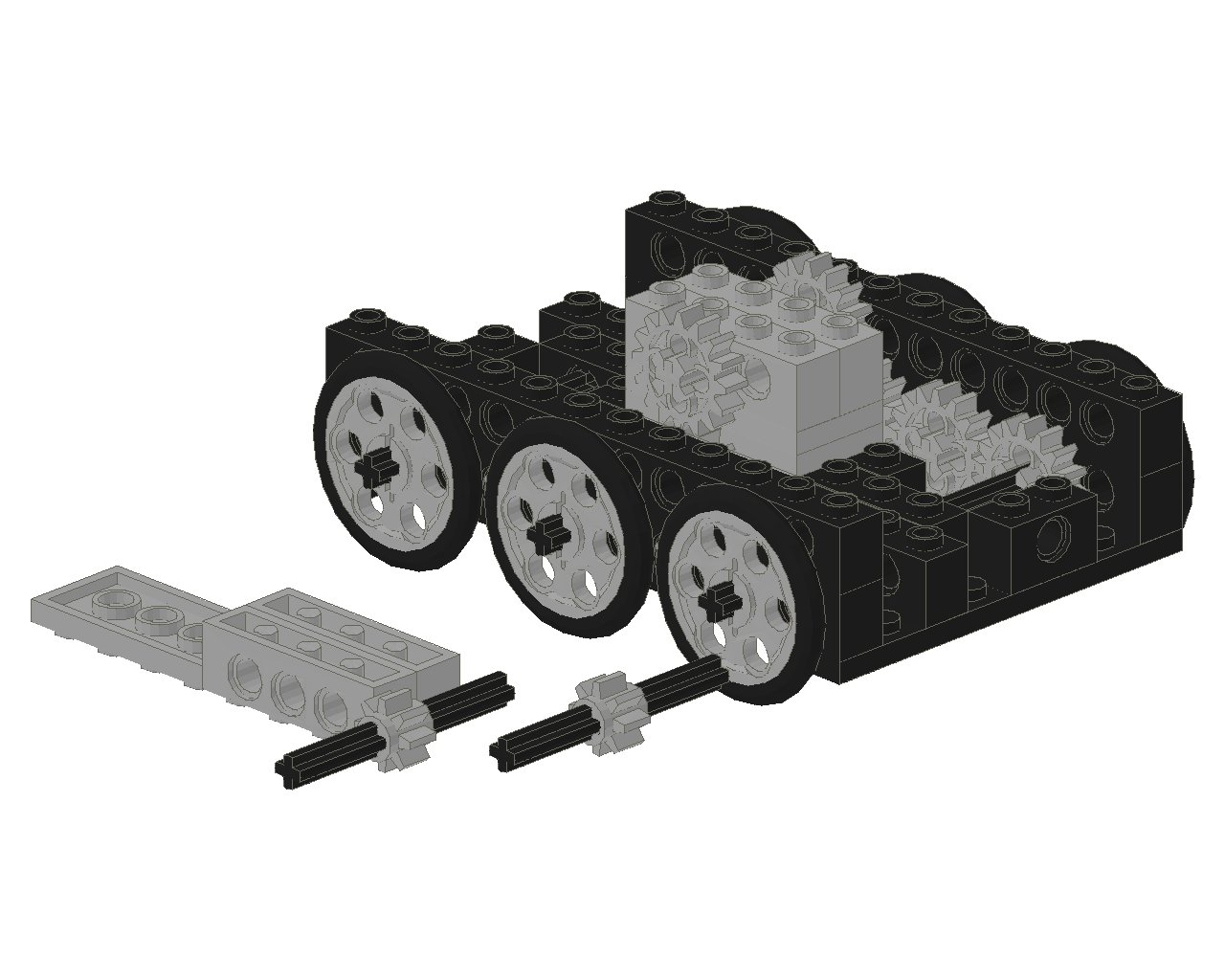
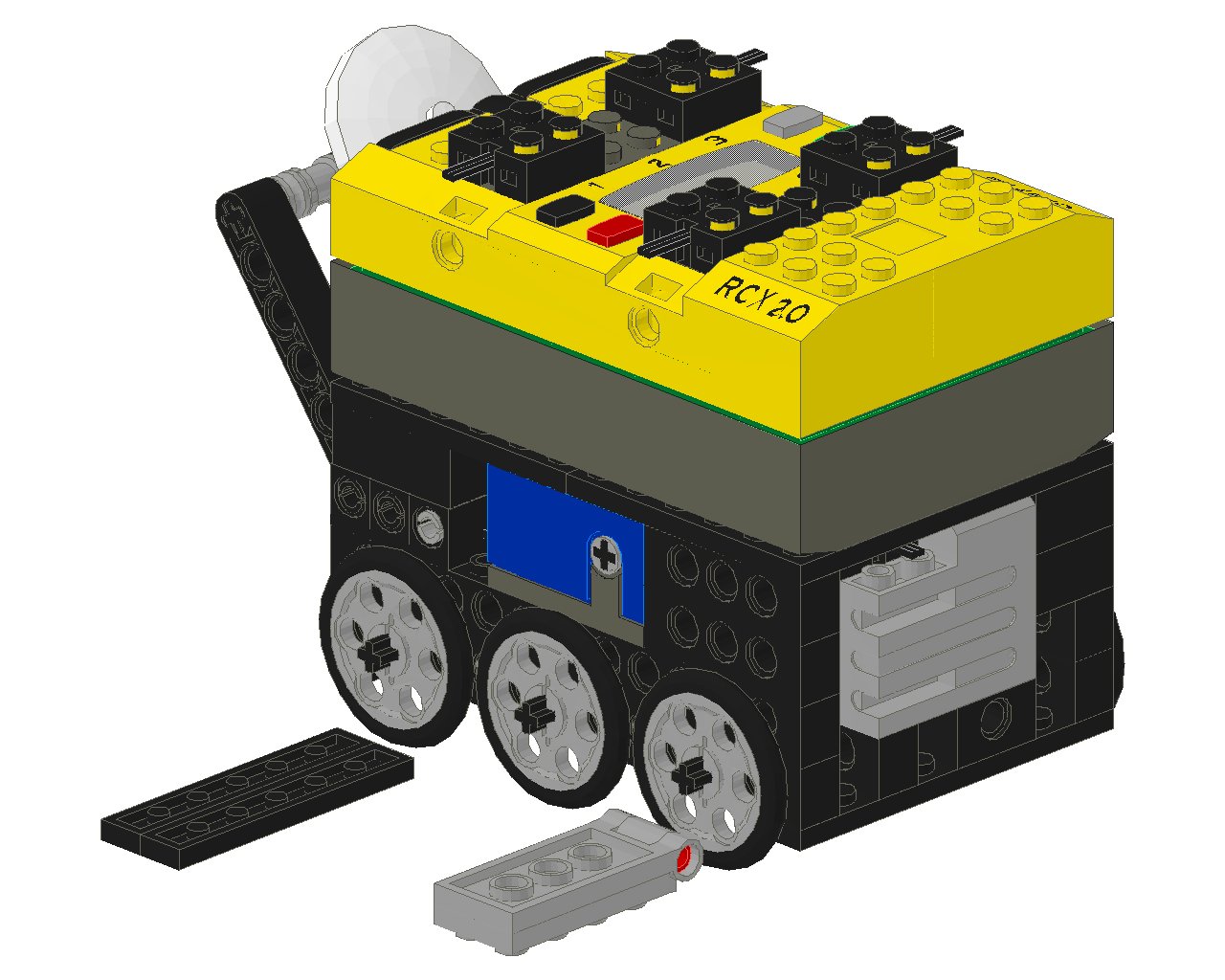
Bauanleitung Teil 4 |
|
Bauanleitung Teil 5 |
|
Bauanleitung Teil 6 |
|
Bauanleitung Teil 7 |
|
Bauanleitung Teil 8 |

|
Bauanleitung Teil 9 |

|
Bauanleitung Teil 10 |
|
Bauanleitung Teil 11 |

|
Bauanleitung Teil 12 |
|
Bauanleitung Teil 13 |
|
Bauanleitung Teil 14 |
|
Bauanleitung Teil 15 |