

|
|
|
|
Video 6.46 min
|
At the beginning of this year a Hamburg group of artists called f18 came to our professor Kai von Luck, with the request for support with their current project. This was the first autonomous robot project that the group of artists wanted to build. Assistance they expected with the programming of the robots. The artists of f18 already manufactured several objects for the Australian artist Stelarc among other things. So for example the "Movatar" and the 6 legged Walker of "Exoskeleton". The group member are Gwendolin Taube, Stefan Doepner, Jan Cummerow, Lars Vaupel and Tom Diekmann. |

All photos ! |
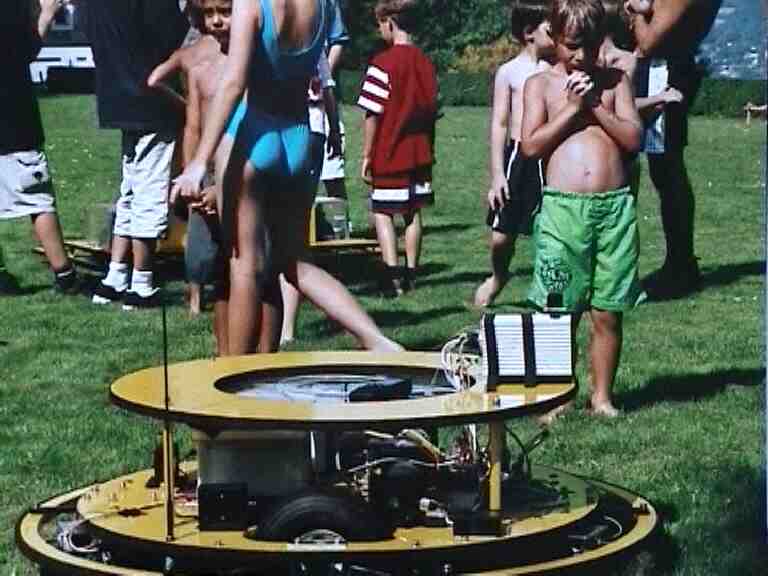
These robots were build on behalf of the cultural department of the Swiss MIGROS (the culture percent). The MIGROS is a Swiss cooperative, which spends one percent of its turnover on culture projects. Within this framework all two year a meeting takes place named "playground" . With this meeting the newest computer-games and play-consoles are presented, discussion platforms offered, computer art shown and some more. f18 should build three autonomous robots that were able to move themselves in a park and react and interact with their environment (particularly on spectators). In the photo you can see Dominik Landwehr (responsible for Science & Future: Media & experiment with the MIGROS culture per cent and jointly responsibly for this "playground") with one of the finished robots in the park of the GDI (in the background) in Rueschlikon (near Zurich, Switzerland). |

All photos ! |
The park in which the robots should drive has approximately the size of a football field. In this photo you can estimate the size. Additionally you can see the SSE (stationary server unit) in this photo and the low resolution display which belonged to this project. The SSE edits pictures for the display, which among other things came from one of the robot (4 Cameras with radio). |
All photos ! |
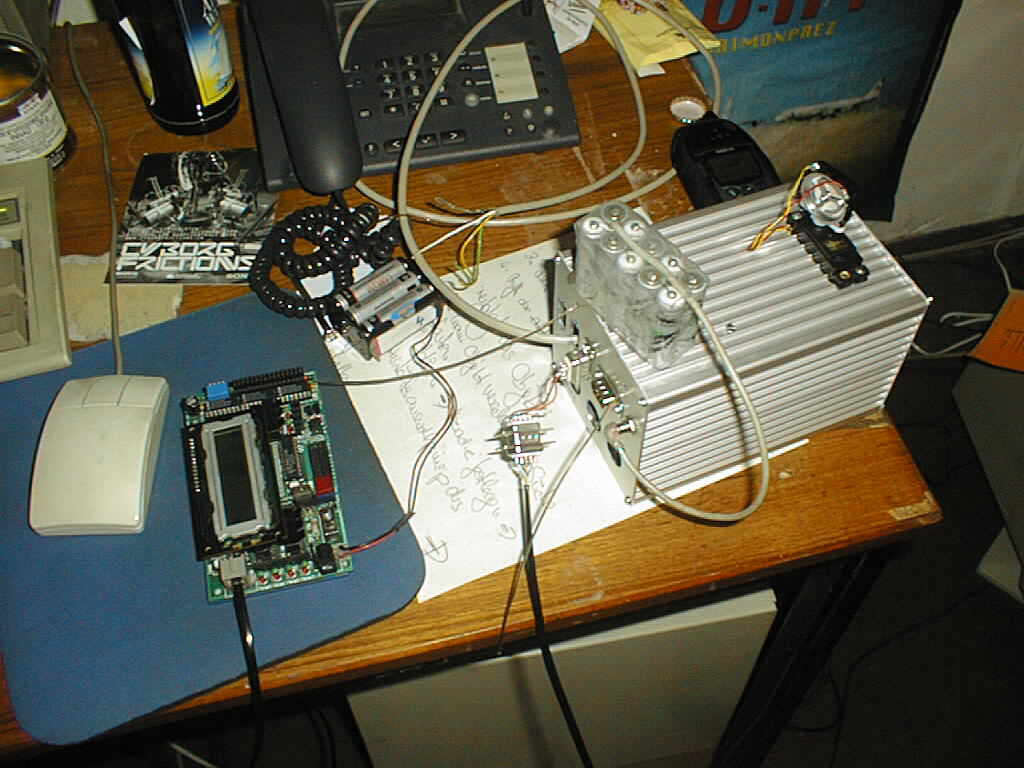
In order to implement the desired behavior, some sensor technology was necessary. On board the robots had (difference able) GPS recipient (Garmin G12), a GPS difference recipient (thank you here to the Federal Office for national topology (Bundesamt für Landestopologie) in Berne, Switzerland. They offered us 3 of this GPS difference recipient and the pertinent service unbureaucratically and free of charge for the entire time we needed it), a digital compass (V2X), Bumpers, wheel revolution sensors (Shaft Encoder from f18 manufacturing) and an ultrasonic sensor (Polaroid) which was attached on a 180° servo. In the photo you can see one of our 6.270 board assigned to an aluminum box. This box contains the f18 logic (f18-control with Atmel Controller). These two boards communicated via the serial interface, for which (internal only) a Protokol had to be agreed upon and implemented. That was necessary, because the only sensor technology, which was attached direct at the 6.270 board were the buttons from the Bumpers. (hmm, let's call it) Intelligence took place on that 6.270 board. Therefore we only had to read the sensor data via the serial interface from the Atmel board. |

All photos ! |
Here you can see "the round" robot beside the SSE. The mushroom-shaped essay on the SSE can be lifted and lowered pneumatically. Under this "cover" the computer is located, that controls the Diplay. In the background you can see a prospect platform, from which you have a great view on the Zurich lake. |

All photos ! |
"The box", together with Tom Diekmann and Dominik Landwehr. In the background the other side of the Zurich lake. |

All photos ! |
"The ball" The ball attached in the center drove like a TRACKBALL. |
All photos ! |
Despite partial large crush nobody gets hurt ! |