

|
|
|
|

|
So sah das Spielfeld aus, auf dem unsere Roboter agieren sollten. Zwei unserer Kontrahenden sieht man gerade in Aktion. Um die Kisten finden und unterscheiden zu können ist an ihnen ein sogenannter Beacon angebracht (auf einem Plexiglasträger). Dieser Beacon ist ein Infrarot Leuchtfeuer, das man auf 100Hz oder 125Hz einstellen kann. (Dieses Signal ist aufmodeliert auf ein Trägersignal mit ca.40kHz). Diese beiden Frequenzen kann das 6.270 board über einen Empfänger unterscheiden, womit Quelle und Senke eindeutig gekennzeichnet sind. |

|
Wie man sieht stehen die Kisten mit der Öffnung nach außen. Man mußte also ersteinmal die Kiste finden, dann mußte man zu dieser Kiste hinfahren, um dann um die Kiste herum und anschließend in sie hinein zu fahren. In der Kiste mußte man dann den Drops erwischen, ihn aufheben, rausfahren aus der Kiste um ihn in eine andere Kiste zu bringen, ohne dabei an der gerade verlassenen Kiste hängen zu bleiben. Ein Unterfangen, was sich als schwerer als erwartet herausstellte. |
|
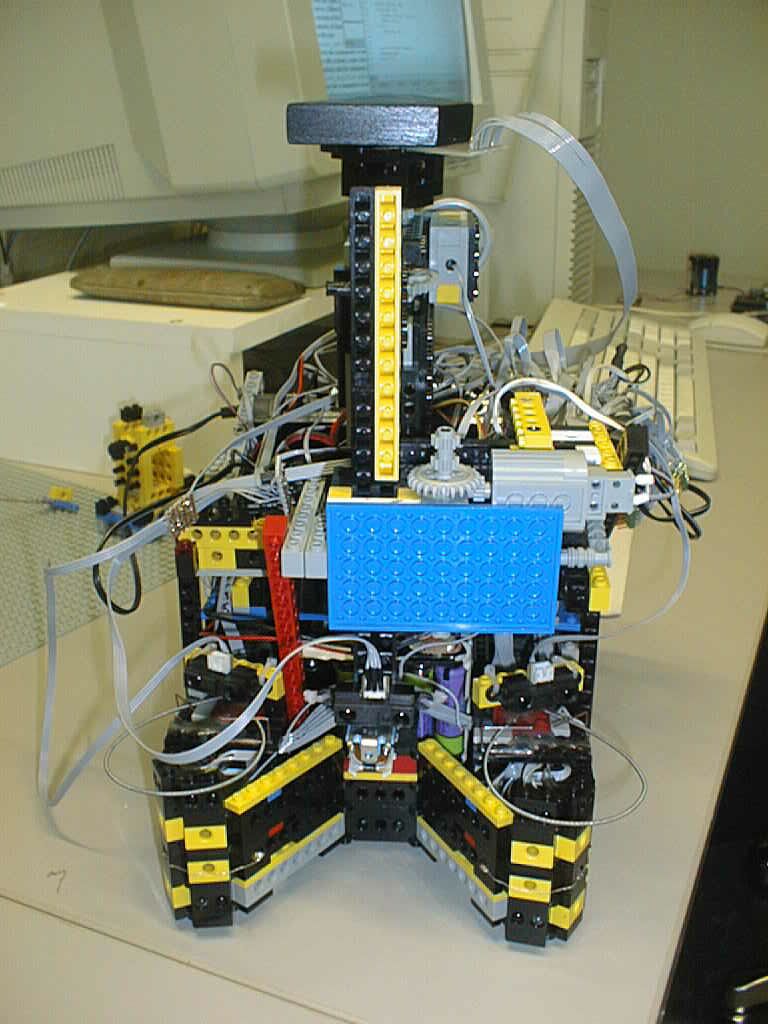
Das ist das Ergebnis des Sommersemesters 2000. Wir haben ihn (sie ?!?) Roberta genannt. Die wichtigste Sensorik kann man auf diesem Foto erkennen. Ganz oben sitzt, auf einem Servo der ein Drehen um 180° ermöglicht, der Empfänger für das Signal des Beacons. Er ist dreigeteilt, so das wir erkennen konnten ob wir direkt auf den Beacon zufahren (mittlerer eng focusiert) oder ob wir vom idealen Kurs abgewichen sind (äußeren beiden breit focusiert). Das Getriebe und der Motor hinter der blauen Platte sind für den Hebemechanismus. Dazu gehört auch die gelb/schwarze Stange. Am unteren Ende dieser Stange (dort ist sie nur noch schwarz) hängt der Magnet, mit dem der Drops aufgehoben werden sollte. Darüber und daneben erkennt man unsere Entfernungssensoren. Es handelt sich hierbei um den analogen Infrarot Entfernungsmesser Sharp GP2D12 (Datenblatt hier) . Unterhalb der äußeren Sharps befindet sich unser Bumper, gebaut aus einer Guitarenseite, 2 Büroklammern und etwas Heißkleber. Wiederum unter den Bumpern kann man den dünnen Draht erkennen, der unsere Bodenschleifer verbindet. |
|
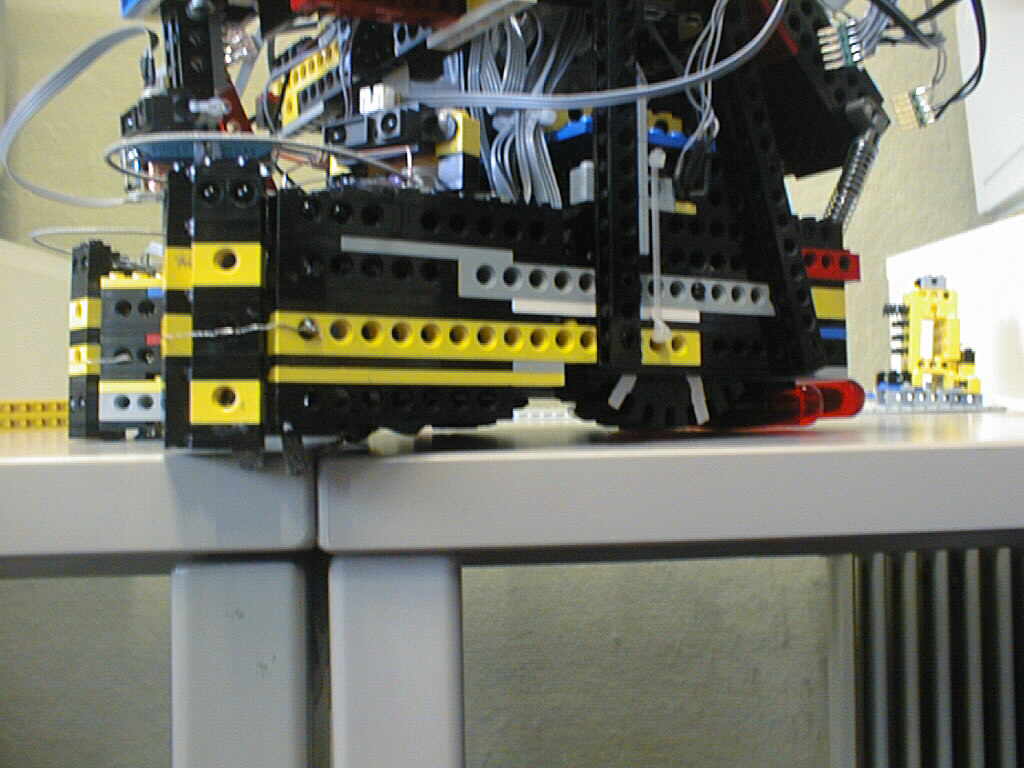
Hier kann man den Draht und unsere Bodenschleifer erkennen. Wir haben auf jeder Seite des Roboters drei Schleifer von Carrera-Wagen angebracht und diese drei miteinander verbunden. Die linke und die rechte Seite haben wir dann auf einen digitalen Eingang des 6.270 boards gelegt. Sie funktionierten somit wie ein Schalter, der uns meldete wenn wir in einer der Kisten waren (diese hatten nämlich einen Blechfußboden). Außerdem kann man auf diesem Bild die Markierungen auf den Rädern erkennen und sieht die Kabel der Reflexionslichtschranke in Höhe der Radoberkante in dem Roboter verschwinden. Hiermit konnten wir die Umdrehung der Räder überwachen (sogenanntes Shaftencoding). |
|
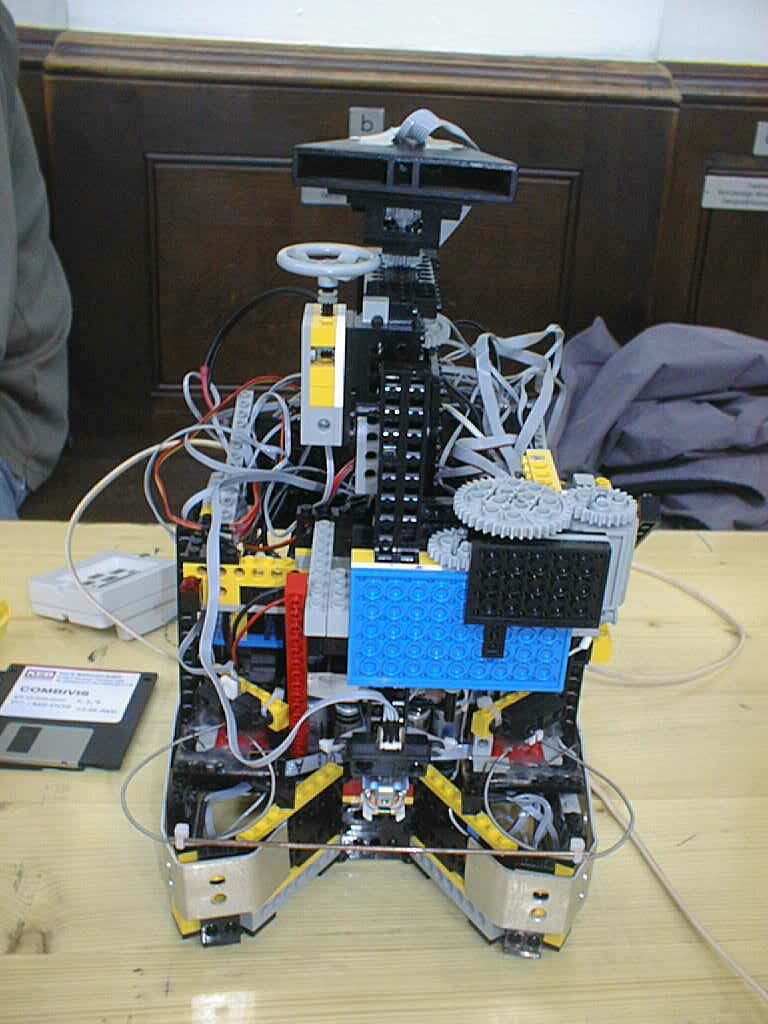
Dieses Foto zeigt den letzten Stand von Roberta. Für mehr Kraft wurde das Getriebe am Hebemechanismus verändert. Die Kabel wurden halbwegs vernünftig verlegt und ein Aluminiumstreifen wurde um ihn herumgebaut, damit er nirgendwo mechanisch hängen bleibt. Um auch zu verhindern das der Roboter mit seiner Mitte irgendwo gegen fährt haben wir die beiden Bumper mit einer Speiche verbunden. |
|
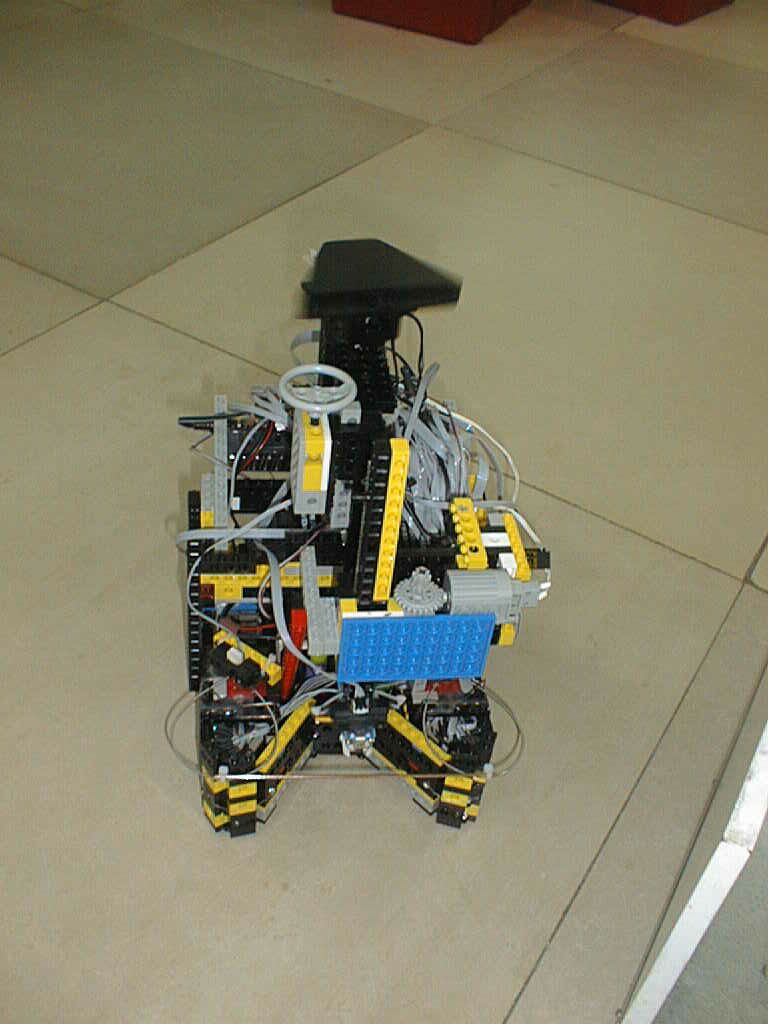
Hier ist Roberta in der Handelskammer Hamburg in Aktion zu sehen.
Üblicherweise findet hier das Finale der Bemühungen des Semesters statt. Mehr Fotos vom vergangenen Wettbewerb gibt es hier . |

|
Dies ist das 6.270 board. Dieses board wurde am MIT entwickelt und wird heute noch von Fred Martin am MIT gepflegt. Ihm haben wir zum Beispiel auch den (Vorgänger des) RCX zu verdanken. Alle nötigen Informationen das 6.270 board betreffend (und anderes) findet man bei ihm. |