

|
|
|
|

|
That's what the playing field looked like, on which our robots should act. To find the crates and to differentiate them there are Beacon attached at them (on a plexiglass carrier). This Beacon is an infrared beacon, which can be adjusted to 100Hz or 125Hz. (this signal is on a carrier signal with ca.40kHz). These two frequencies can be differentiated by the 6.270 board over a recipient, with which source and destination can be characterized unique. |

|
As you can see the crates are located with the opening being outward. We had to find this crate first, then we had to drive to this crate, in order to drive around the crate and afterwards into it. In the crate we then had to get the drops, get out of the crate, around it, into another crate to bring the drops. A venture, which turned out as heavier than expected. |
|
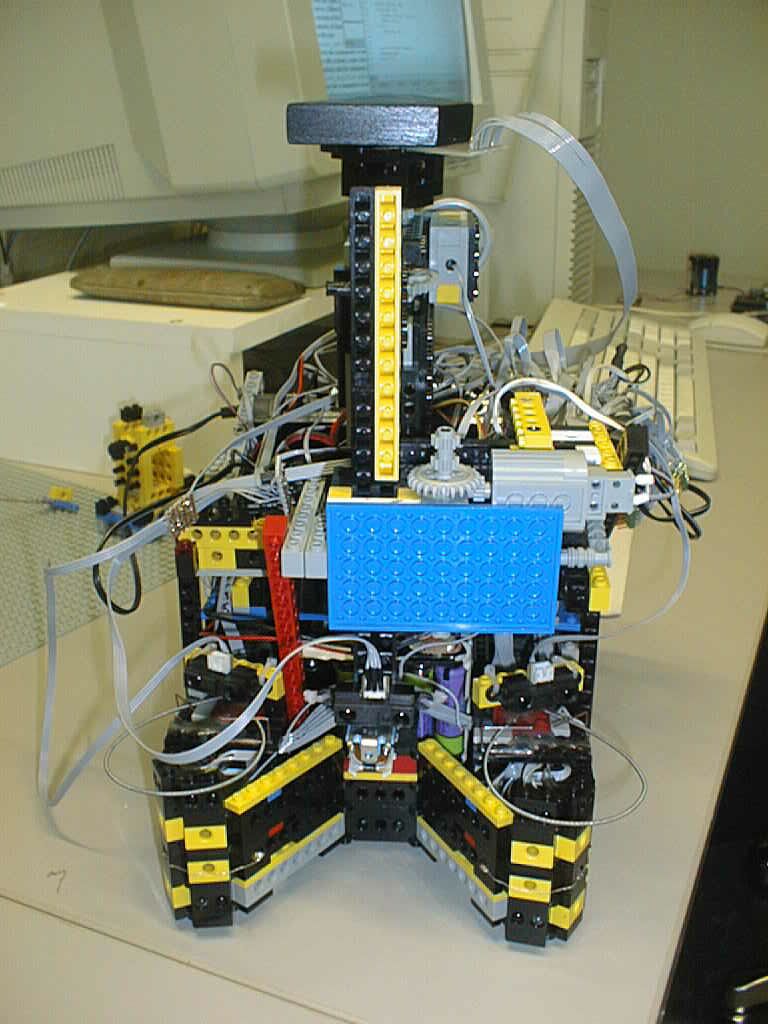
That is the result of the summer semester 2000. We called it Roberta. You can see the most important sensor technology in this photo. on a 180° servo the recipient for the signal of the Beacons sits quite above. It is three-divided, so that we could detect whether we drove directly to the Beacon (middle closely focused) or whether we deviated from the ideal course (outside both focused broadly). The transmission and the engine behind the blue plate are for the lifting mechanism. In addition also the yellow/black bars belongs to it. On the lower end of this bar (it is only black there) the magnet is located, with which the drops should be grabed. Over it and besides you can see our distance sensors. It's the infrared rangefinder Sharp GP2D12 with analog output. (data sheet here). Below the outside Sharps are our Bumper, built from one Guittar string, 2 paper clips and some hot glue. Again under the Bumpern you can see a thin wire, which connects our soil-detectors. |
|
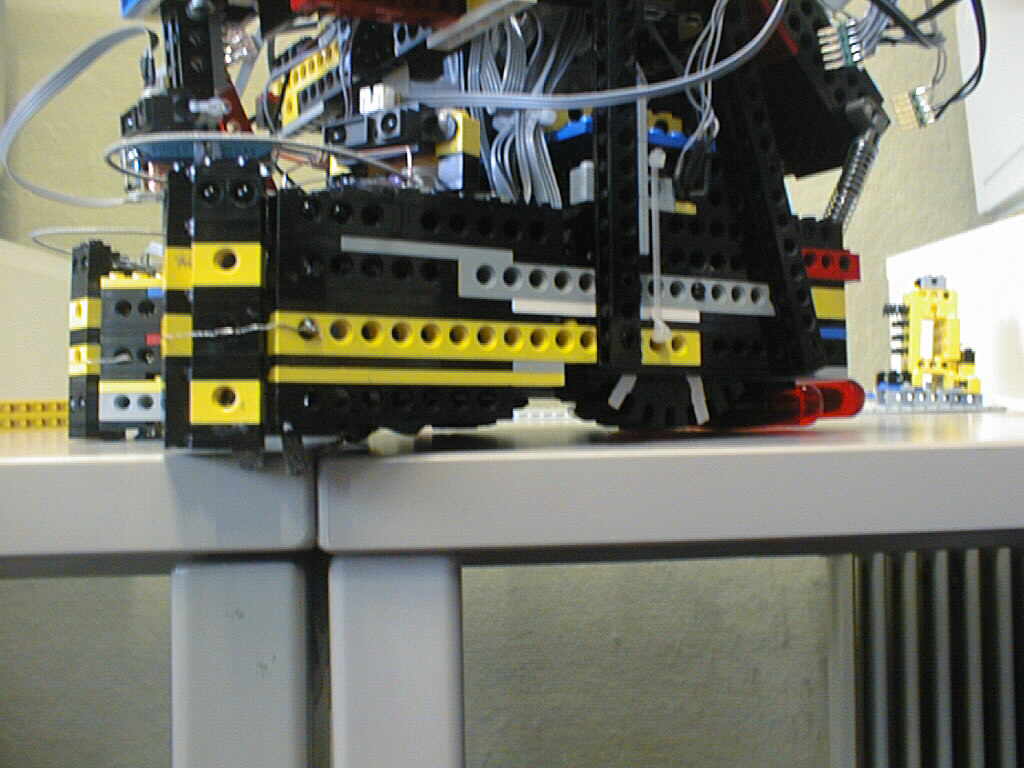
Here you can see the wire and our soil-detector. These functioned like a switch, which announced us if we were in one of the crates (these had a metal floor). Additionally you can see the markings on the wheels in this picture and you can see the cables of the photoelectric barrier at height of the wheels upper edge. Hereby we could monitor the revolution of the wheels (Shaftencoding). |
|
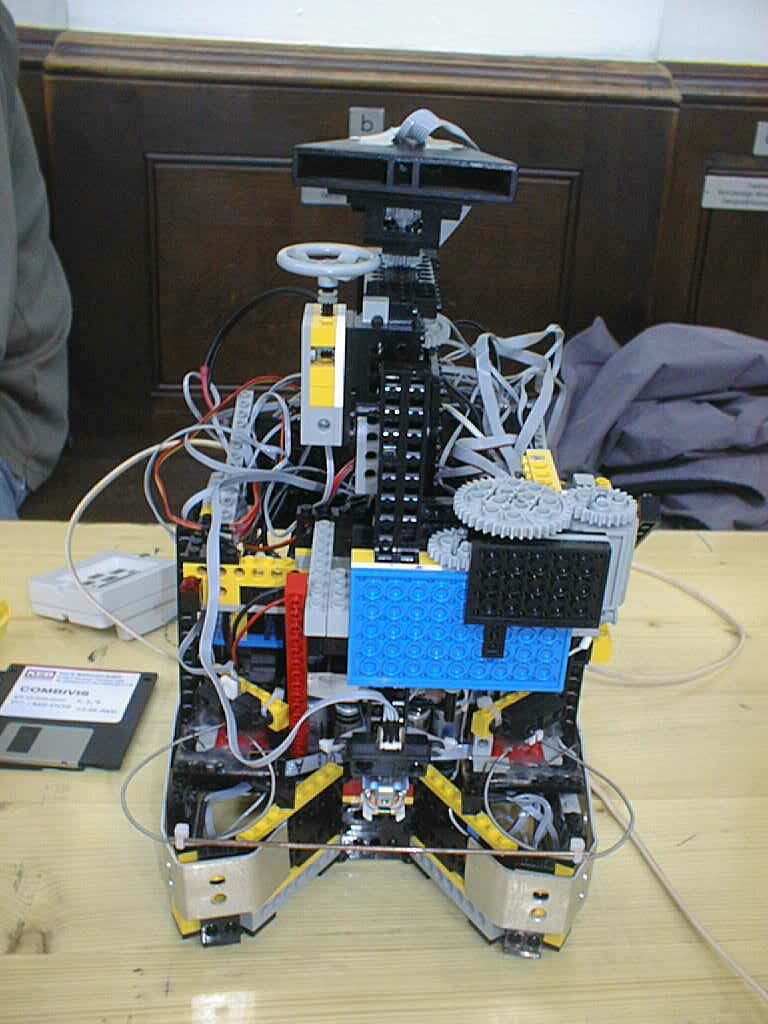
This photo shows the last status of Roberta. For more strength the transmission at the lifting mechanism was changed. The cables were laid halfway reasonably and an aluminum strip was built around it, so that it does not remain hanging anywhere mechanically. To also prevent that the robot drives against something with its center we connected the two Bumper with a spoke. |
|
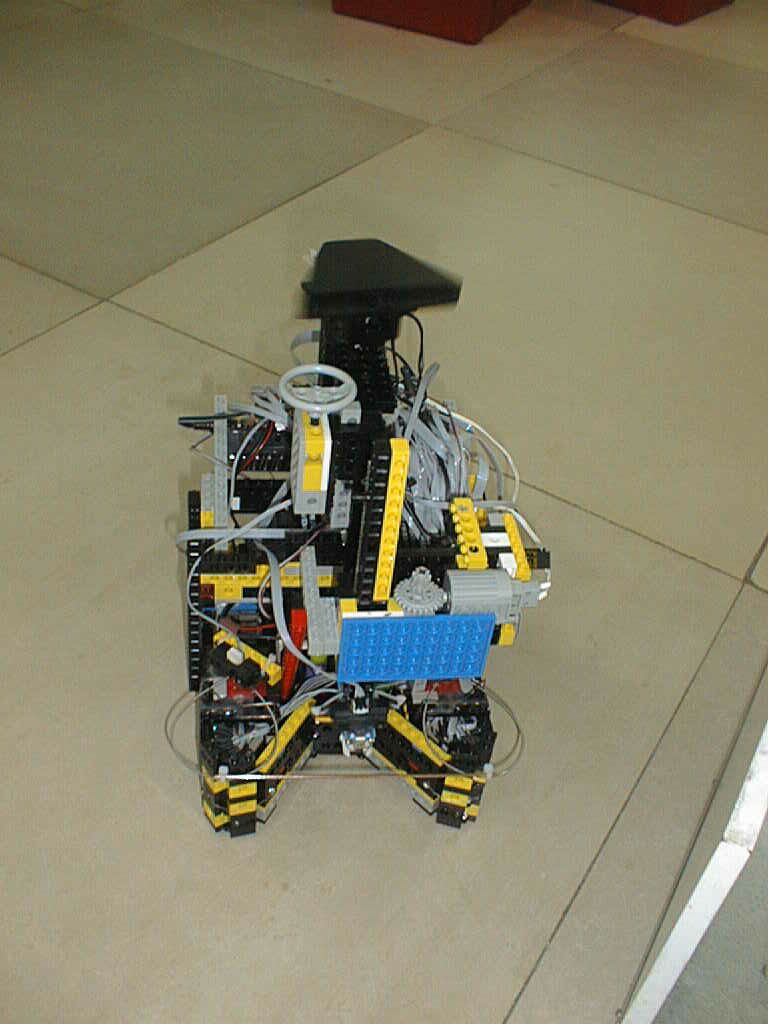
Here you can see Roberta in the Chamber of Commerce Hamburg. Usually here the final of the efforts of the term takes place. More photos of the passed competition you can find here. |

|
This is that 6.270 board. This board was developed at the MIT and is still maintained by Fred Martin at the MIT today. We have to owe (predecessors) the RCX to it for example also. You can find all necessary information concerning to the 6.270 board (and other ones) at Freds world . |