

|
|
|
|

Alle Fotos ! |
Wie bereits erwähnt entstand dieser Roboter im Rahmen eines RoboVision 2000 genannten Wettbewerbs. Aufgabe in diesem Wettbewerb war es den Roboter durch ein rechtwinkliges "Labyrinth" (es waren ein paar Legowände aufgebaut, zwischen denen man durchfahren sollte) zu bringen und am Ende dieses Parcours 4 Baelle von Sockeln zu holen. (Wir haben uns für runterschiessen mit anschließendem umfahren entschieden.) Wichtig war hierbei das man die Vission Command genannte Lego Camera benutzte. Um mit der Camera immer in die gleiche Richtung sehen zu können (und die IR Kommunikation funktioniert) haben wir uns für ein Synchrodrive entschieden. Leider hatten wir keine turntables von Lego zur Verfügung, weshalb wir uns turntables selbst bauen mussten. |

Alle Fotos ! |
Die selbstgebauten turntables lassen ca. 100° Drehungen zu. Mit anderen Armen zwischen Radsatz und Ansteurung lssen sich aber auch grössere Drehungen realisieren. Da Lego immer leichtes Spiel hat (und haben muß) entstehen dann allerdings Nachteile für die Genauigkeit der Lenkung. Verbaut wurde neben einem RCX zwei Drehsensoren und vier Motoren. Der eine Drehsensor überwacht die Ausrichtung der Räder, der andere die Drehung der Räder. 2 Motoren treiben die Räder an (eigentlich würde es einer tun, weil die Räder immer in eine Richtung drehen), 1 Motor lenkt die Räder, der letzte Motor aktiviert unsere Abschußvorrichtung. |
Alle Fotos ! |
Auf diesem Foto sieht man die Abschußvorrichtung in Aktion. Leider hat man uns nur drei dieser Katapultsätze gegeben. Hätten wir mehr gehabt hätten wir alle Bälle runterschiessen können. |

Alle Fotos ! |
So sieht der Roboter ohne den RCX aus. Im Vordergrund sieht man den Schneckenantrieb, der für die Ausrichtung der Räder verantwortlich ist. Auf der selben Achse steckt auch der Drehsensor, der die Drehung überwacht. Die beiden Zahnräder ganz links auf der Achse dienen als Handrad. Die Motoren links (unten) und rechts (hinten) sind die Antriebsmotoren der Räder. Der andere Motor links (oben) betätigt die Abschußvorrichtung. Das mittlere Zahnrad überträgt die Drehung nach unten. Oben auf dem Zahnrad sitzt ein mechanischer Anschlag, der verhindern soll, das die Räder wie ein Schnappverschluss umschlagen. |

Alle Fotos ! |
Der Clou : Zieht man das mittlere Zahnrad ab, kann man den Gundkörper vom Fahrwerk trennen. |

Alle Fotos ! |
Der Grundkörper läßt sich also bis auf wenige Einschränkungen frei gestallten. Die Einschränkungen sind hierbei : 1. Die Löcher für die Achsen müssen vorhanden sein 2. Die Motoren für den Antrieb müssen an der gleichen Stelle sitzen 3. Die Achse für die Ausrichtung der Räder muß erreichbar sein |

Alle Fotos ! |
So sieht der von uns gestalltete Grundkörper von unten aus. Der Grundkoerper ist abgesehen von den beiden Zahnrädern des Radantriebs glatt. |

Alle Fotos ! |
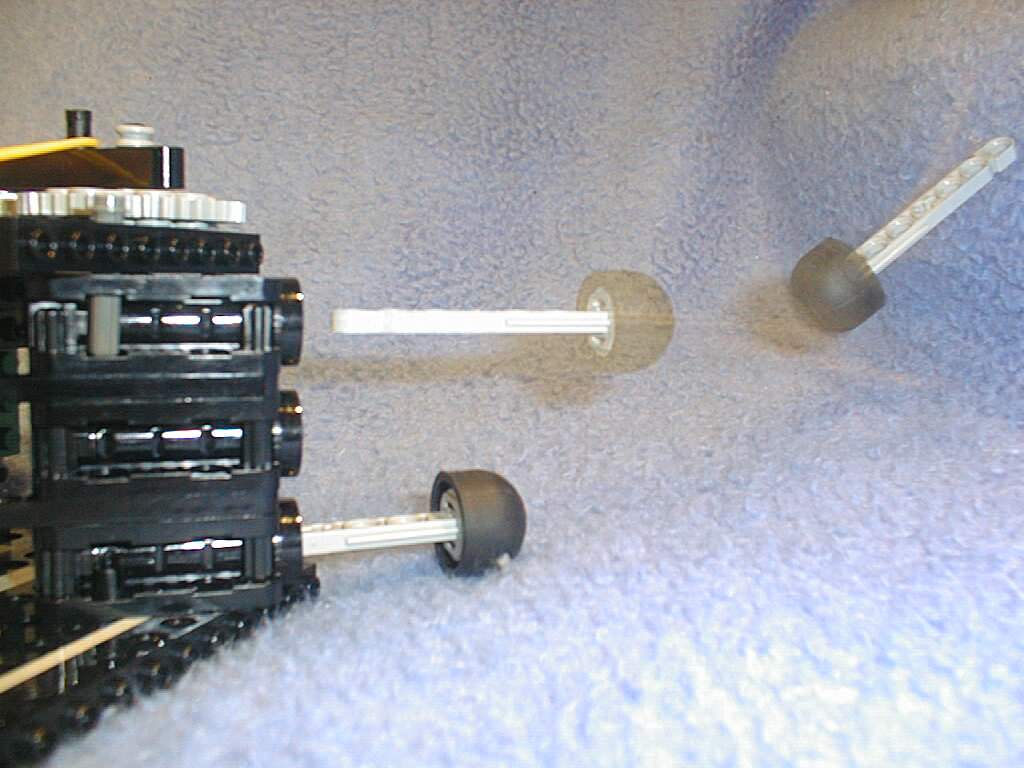
Die zwei verschiedenen Radsätze vor dem teilweise demontierten Fahrwerk. Es gibt zwei verschiedene Radsätze, weil 4 gleiche Radsätze nie in die gleiche Richtung zeigen könnten. Die Demontage ist auf der Fotoseite Schritt für Schritt festgehalten. |

Alle Fotos ! |
Der einfachere der beiden Radsätze im Detail. Oben rechts der montierte Radsatz, links darunter alle benötigten Teile, so hingelegt das man ihre Position erkennen kann. ACHTUNG ! Das rot eingekreiste Teil ist von uns verändert worden. Normalerweise ist die eine Öffnung für drehbare Achsen, die andere Öffnung für nicht drehbare Achsen vorgesehen. Wir brauchten aber an dieser Stelle ein Teil, das in beiden Öffnungen eine drehbare Achse zuließ. Deshalb haben wir mit einer Schlüsselfeile die Arretierung für die Kreuzachse herausgefeilt. |

Alle Fotos ! |
Der schwerere der beiden Radsätze im Detail. Oben rechts der montierte Radsatz, links darunter alle benötigten Teile, so hingelegt das man ihre Position erkennen kann. ACHTUNG ! Das rot eingekreiste Teil ist von uns verändert worden. Diese Teile gibt es von Lego nur in anderen Größen. Wir haben deshalb eins mit fünf Löchern genommen und haben daraus zwei mit zwei Löchern gemacht. |