

|
|
|
6beiner |
Synchrodrive |
|
|
animieren ! (325k) |
animieren ! (713k) |
|
Ein 6 beiniger Roboter der im Rahmen des Wahlpflichtpraktikums "Mobile Roboter" an der Fachhochschule Hamburg entstanden ist. Er kommt mit 2 Motoren und 4 Tastern aus. 2 der Taster sind in dem Bumper (den Fühlern) verbaut, die anderen 2 werden im Inneren benötigt, um die Beine der linken Seite mit den Beinen der rechten Seite (und umgekehrt) zu synchronisieren. So steht er immer mit drei Beinen auf dem Boden. Als naechstes wollen wir ihm das Folgen einer Linie beibringen. Dazu werden wir allerdings wenigstens einen Lichtsensor benötigen. Eine ausfuehrliche Anleitung zum Bau dieses Roboters gibt es in kürze hier . |
Dieser Roboter entstand im Rahmen eines RoboVision 2000 genannten Wettbewerbs, den Lego zusammen mit einer PR Agentur ins Leben gerufen hatten. Dieser Roboter nutzt ein sogenanntes synchrodrive. Bei diesem Verfahren drehen sich aller Räder gleichzeitig mit der selben Geschwindigkeit und Richtung. Das hat den Vorteil, das er relativ zum Ursprung seine Lage nicht verändert. Das kommt einem besonders dann zugute, wenn man z.B. in eine Richtung sehen will, so wie es zur IR Kommunikation notwendig ist. Besonderer Clou : Durch abziehen eines Zahnrades kann man Fahrwerk und Grundkörper trennen. Wie das geht und ..... eine ausfuehrliche Anleitung zum Bau dieses Roboters gibt es in kürze hier . |
Dropssammler |
Roboter im Park |
 |
 |
|
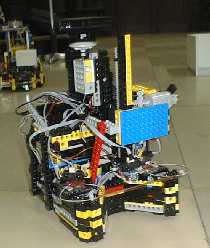
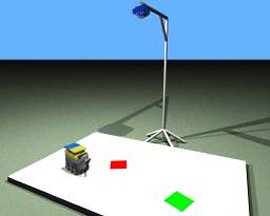
Dies ist der Roboter, der im Sommer- semester 2000 von unserem Team hergestellt wurde. Aufgabe dieses Roboters war es in eine Art Garage zu fahren einen mit einem Blech versehenen Holzzylinder aufzusammeln und diesen in eine andere Garage zu bringen. (also von Quelle nach Senke) Auf dem Spielfeld wurden 2 Quellen und 2 Senken aufgebaut und je zwei Roboter "kämpften" gleichzeitig gegeneinander. Diese Roboter sind mit dem 6.270 board vom MIT ausgestattet. Dies ist der Vorgänger des im Moment aktuellen HANDY boards. Eine Bauanleitung gibt es für diesen Roboter leider nicht. Dafüer erklären wir hier in kürze die Regeln und gehen auf ein paar technische Details ein. |
Diese 3 Roboter sind im Auftrag des schweizer MIGROS Kulturprozent von der hamburger Künstlergruppe f18 hergestellt worden.
Diese Roboter fuhren in einem Park, der zum Gottlieb Duttweiler Institut (GDI) gehört. Auf einer etwa Fussballfeld grossen Rasenfläche fuhren sie einer einmal erfassten Person solange hinterher, bis diese entweder aus dem "Gesichtsfeld" des Roboters verschwand oder eine gewisse Zeit lang regungslos stehen blieben. Auf Anregung von Prof. Kai von Luck haben wir die Künstlergruppe in den Semesterferien SS00/WS00 unterstützt und die Interaktionssoftware geschrieben. (Bei so manchem technischen Problem hat man auch unseren Rat bedacht.) Technische Details gibt es hier. |
3 Sharps an einem Eingang |
Erweiterte Vision Command |
 |
 |
|
3 Infrarot Entfernungssensoren an einem Eingang !! Die Idee aus dem Lugnet einen Sharp GD2D02 Sensor (serieller Ausgang) an einen RCX anzuschliessen brachte mich (Rainer) auf die Idee meine 3 Sharp GP2D12 (analoger Ausgang) ebenfalls an den RCX anzuschliessen. Der GP2D02 wurde erfolgreich aber mit einigem Aufwand von Andreas Peter an den RCX angeschlossen. Die von mir verwendeten Schaltungen stammen von Michael Gasperi der auf dem Gebiet der Selbstbausensoren hervoragendendes geleistet hat und dem ich an dieser Stelle für seine Arbeit danken moechte. Details zu diesem 3-fach Sensor gibt es hier . |
Dieser Kameraumbau macht es möglich auch bei völliger Dunkelheit etwas mit dieser Kamera zu sehen. Die Lego USB Kamera zieht etwa 100 mA Strom. Es stehen also noch 400 mA zur Verfügung, die nicht genutzt werden. Diese nutze ich um 8 IR-Dioden mit jeweils ca. 50 mA zu betreiben. Informationen zu diesem Umbau bekommen Sie hier . |
Studienarbeit |
Studienarbeit |
|
Diese Studienarbeit (7.9MB PDF) entstand im Rahmen eines Projektes der Künstlergruppe f18 in Zusammenarbeit mit dem Robotlab der Fachhochschule Hamburg und beschreibt die experimentelle Zusammenarbeit von Künstler und Informatikern, in dessen Mittelpunkt die Entwicklung dreier mobiler Roboter und ihrer Choreographie steht. ... mehr ... |
Das Ziel dieser Arbeit (2.9MB PDF) ist es, den grundlegenden Aufbau eines Roboterlabors zu beschreiben. Dies umfaßt die notwendige Hardware, die Software und Hinweise für die Durchführung des Labors. Es werden aber auch Ansätze zur Begründung des Einsatzes eines Roboterlabors gegeben. |
Diplomarbeit |
|
Realisierung eines Webcam basierten Kamera-Systems für mobile Roboter |
|
|
Diese Diplomarbeit (7 MB PDF) beschäftigt sich mit der Möglichkeit günstige Webcams durch digitale Bildverarbeitung als Sensor für mobile autonome Roboter einzusetzen. Das im Rahmen der Diplomarbeit entstandene Programm (CATCH.exe) ist für das Robot-Lab der Hochschule für Angewandte Wissenschaften Hamburg gedacht, in dem LEGO MINDSTORMS ROBOTICS INVENTION SYSTEME eingesetzt werden, mit denen das entstandene Programm über eine Infrarotschnittstelle kommuniziert. In dieser Arbeit werden die angewandten Methoden der Bildverarbeitung beschrieben und Alternativen aufgezeigt. Weitere Informationen, eine Bauanleitung des Roboters und einiges mehr finden Sie hier. Über Fragen und Anregungen freut sich Rainer Balzerowski. |