

|
|
|
6 legged Walker |
Synchrodrive |
|
|
animate ! (325k) |
animate ! (713k) |
| A 6 legged robot developed in the context of the practical course "mobile robot" at the University of applied sciences Hamburg. It comes with 2 engines and 4 buttons from which 2 buttons are used in the Bumper (the feelers). The other 2 button are needed in the inside, in order to synchronize the legs of the left side with the legs of the right side (and the other way round). Thus it is always with three legs on the soil. You can find a detailed description here . | This robot was developed in the context of a RoboVision 2000 called competition, which Lego as well as a PR agency had brought up. This robot uses a so-called synchrodrive. With this technique all wheels turn at the same time with the same rate and direction. That has the advantage, that it does not change its direction relative to the origin. That benefits it particularly then, if the robot needs to see in a direction, as it is e.g. necessary for IR communication. Special Clou: You can separate chassis and base taking off one gear wheel. A detailed guidance how to build this robot you will find here . |
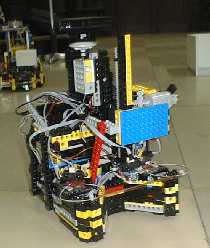
Drops collector |
Robots in the park |
 |
 |
| This is the robot, which was manufactured in the summer term 2000 by our team. Function of this robot was to drive into a type of garage and collect a wood cylinder with a metal plate on the top. This drop then had to be transported into another garage (thus kind of source and destination problem). On the playground 2 sources and 2 destinations were located and two robots "fought" at the same time against each other. These robots are equipped with the 6.270 board from the MIT. This is the predecessor of the moment current HANDY board. There is unfortunately no building guidance for this robot. We explain the rules here and deal with a few technical details. | These 3 robots were build on behalf of the Swiss MIGROS "culture per cent" by a Hamburg group of artists called f18. These robots drove in a park, which belongs to the Gottlieb Duttweiler Institute (GDI). They drove on a about football field large lawn. They drove towards any person who entered the "visual field" of the robot until the person disappeared from the "visual field" of the robot or remained a certain time long motionless. On suggestion of Professor Kai von Luck we supported the group of artists in term holidays SS00/WS00 and wrote the interaction software. You can find technical details here. |
3 Sharps using 1 input |
Extended Vision Command |
 |
 |
|
3 infrared distance sensors using one input !! The idea from the lugnet to attach a Sharp GD2D02 sensor (serial output) to a RCX brought me (Rainer) on the idea to attach my 3 Sharp GP2D12 (analog output) likewise to the RCX. The GP2D02 was attached successfully to the RCX however with some expenditure by Andreas Peter . The circuits I use here come from Michael Gasperi who did excellent work in the area of the home-brewed sensors and whom I would like to thank for his work here. Here are details about this triple sensor. |
The changes I made to the Camera make it possible to see something with this camera as well in complete darkness. The Lego USB camera draws about 100 mA current. Still 400 mA are available thus, which are not used. I use these 400 mA to drive 8 IR diodes with approx. 50 mA in each case. You can get information about this changes here . |
Studienarbeit |
Studienarbeit |
|
Diese Studienarbeit (7.9MB PDF) entstand im Rahmen eines Projektes der Künstlergruppe f18 in Zusammenarbeit mit dem Robotlab der Fachhochschule Hamburg und beschreibt die experimentelle Zusammenarbeit von Künstler und Informatikern, in dessen Mittelpunkt die Entwicklung dreier mobiler Roboter und ihrer Choreographie steht. ... mehr ... |
Das Ziel dieser Arbeit (2.9MB PDF) ist es, den grundlegenden Aufbau eines Roboterlabors zu beschreiben. Dies umfaßt die notwendige Hardware, die Software und Hinweise für die Durchführung des Labors. Es werden aber auch Ansätze zur Begründung des Einsatzes eines Roboterlabors gegeben. |