 |
|
|---|---|
Mobile Roboter mit Omnidirektionalen Antrieb WS2006/2007 |
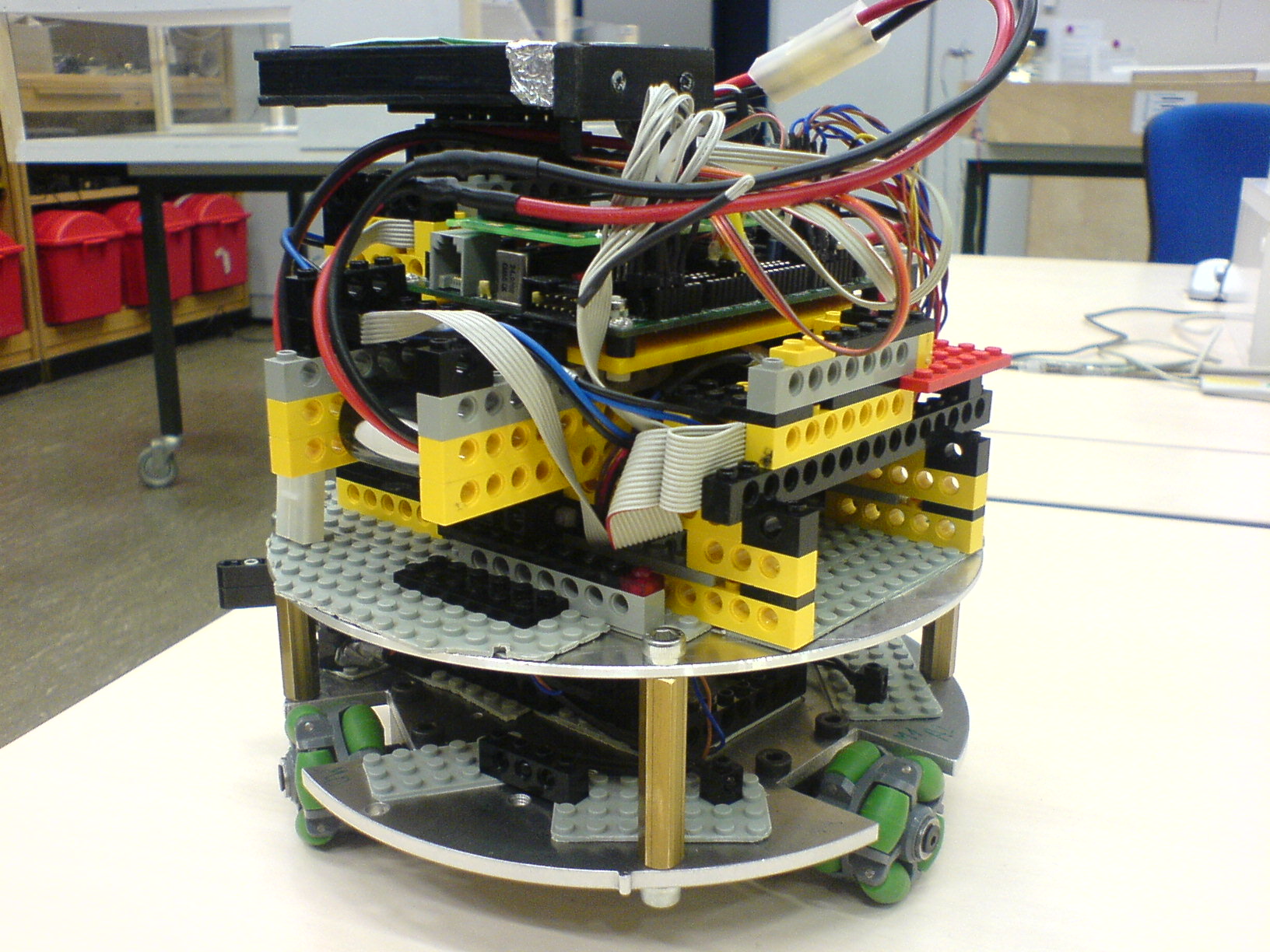
Aufbau des Roboter
Der Roboter ist nach einem Sandwich-Prinzip aufgebaut, Omnidirektionale Plattform oben drauf die Plattform für die Aufbauten, welche die gesamte Steuerung und Sensorik aufnimmt. Energieversorgung ist im Sandwich untergebracht. Bei unserem Roboter ist die Energieversorgung im Aufbau untergebracht, was sich Nachteilig auf dem Schwerpunkt auswirken kann.
Mehr geht zwar immer, aber ich wollte mehr dazu nicht schreiben ;-)