|
|
Robotfußball



Durch das Wort Robotfußball ist eigentlich schon klar, worum es geht.
Genauer betrachtet ist es aber eine hervorragende Plattform für Forschung und Fortschritt, unter anderem in den Bereichen:
- Navigation mobiler Roboter
- Multi-Agenten Systeme
- Reaktive Systeme
- Künstliche Intelligenz
Robotfußball räumt auch mit der Kritik auf, Informatik sei abstrakt und nicht greifbar.
Dies bestätigen große Zuschauermengen auf den internationalen Wettkämpfen und vor dem Fernseher bei zahlreichen Berichten.
Hier treffen sich Wissenschaft und Unterhaltung in einem Gebiet, das vor allem in Deutschland gerne als „schönste Nebensache der Welt“ beschrieben wird.
Die beiden wichtigen internationalen Wettbewerbe sind der
Robocup
und die Weltmeisterschaft von der
„Federation of International Robot-Soccer Association“ (FIRA).
Dabei gibt mehrere Kategorien, die sich hauptsächlich durch Anzahl, Größe bzw. Bauart des Roboters und der Größe des Spielfeldes von einander unterscheiden:
Robocup
FIRA
Simulation League
HuroSot
Small Size Robot League (f-180)
KheperaSot
Middle Size Robot League (f-2000)
MiroSot
Four-Legged Robot League
QuadroSot
Humanoid League (from 2002)
RoboSot
E-League (from 2004)
SimuroSot
RoboCup Commentator Exhibition
Robotfußball ist aber nicht nur Spaß. Die Theorien dahinter finden in der Industrie ihre Anwendung.
So können Entwicklungen der Steuer- und Regelungstechnik, digitaler Bildverarbeitung, künstlicher Inteligenz, autonomer Multiagentensysteme und der Sensorik zum Beispiel in Fertigungsanlagen eingesetzt werden. Ebenso ist es im Haushalt der Fall. Es gibt auch eine spezielle Rescue League für den Katastropheneinsatz.
HAW-Robotfußball
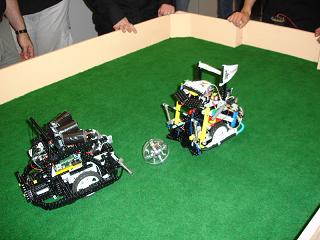
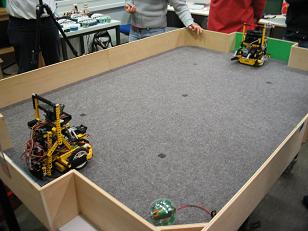
Das RobotLab wird im Umfang des Wahlpflichtprojektes „Mobile Roboter“ an der HAW Hamburg seit gut zehn Jahren für den Umgang mit (Multi-) Agentensystemem genutzt.
Dem unendlichen Einsatz der verantworlichen Professoren
Kai von Luck
und
Gunter Klemke
und vieler unermüdlicher Helfer zum Dank gibt es im RobotLab funktionable Ausrüstung für mindestens sechzehn KI-hungrige Studierende.
Das Projekt läuft analog zur
RoboCup Junior League.
Benutzte Hardware: Board, Aktoren, Sensoren
Als Kernstück eines Fußball-Roboters im RobotLab präsentiert sich das
AKSEN-Board
aus dem „Labor für Künstliche Intelligenz“ der Fachhochschule Brandenburg.
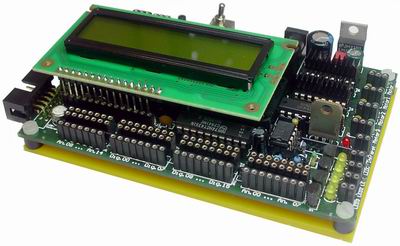
Es ist unter anderem mit diversen analogen und digitalen Eingängen, Schnittstellen für mehrere Motoren und Servomotoren, einem LCD-Display und Dip-Schaltern ausgestattet (genaue Peripherie
hier
).
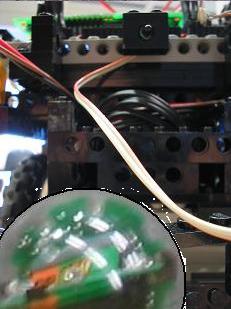
Die Eingänge haben wir mit unterschiedlichen Sensoren und Aktoren belegt:


Infrarot Dioden
Sharp Distanz Sensoren
Taster / Schalter
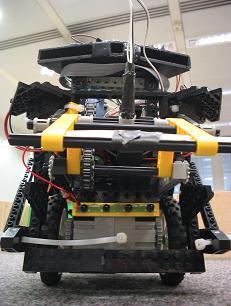
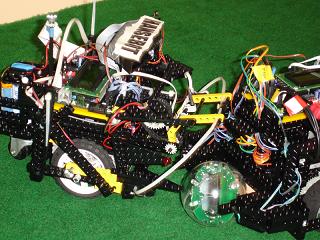
Das Fahrgestell haben wir mit LEGO konstruiert. Die Motoren sind ebenfalls LEGO-kompatibel. Alles weitere haben wir mit möglichst wenig Heißkleber und Kabelbindern befestigt.


mail me
Robotfußball
| | | |
Durch das Wort Robotfußball ist eigentlich schon klar, worum es geht.
Genauer betrachtet ist es aber eine hervorragende Plattform für Forschung und Fortschritt, unter anderem in den Bereichen:
- Navigation mobiler Roboter
- Multi-Agenten Systeme
- Reaktive Systeme
- Künstliche Intelligenz
Robotfußball räumt auch mit der Kritik auf, Informatik sei abstrakt und nicht greifbar. Dies bestätigen große Zuschauermengen auf den internationalen Wettkämpfen und vor dem Fernseher bei zahlreichen Berichten.
Hier treffen sich Wissenschaft und Unterhaltung in einem Gebiet, das vor allem in Deutschland gerne als „schönste Nebensache der Welt“ beschrieben wird.
Die beiden wichtigen internationalen Wettbewerbe sind der Robocup und die Weltmeisterschaft von der „Federation of International Robot-Soccer Association“ (FIRA). Dabei gibt mehrere Kategorien, die sich hauptsächlich durch Anzahl, Größe bzw. Bauart des Roboters und der Größe des Spielfeldes von einander unterscheiden:
Robocup |
FIRA |
|---|---|
Simulation League |
HuroSot |
Small Size Robot League (f-180) |
KheperaSot |
Middle Size Robot League (f-2000) |
MiroSot |
Four-Legged Robot League |
QuadroSot |
Humanoid League (from 2002) |
RoboSot |
E-League (from 2004) |
SimuroSot |
RoboCup Commentator Exhibition |
Robotfußball ist aber nicht nur Spaß. Die Theorien dahinter finden in der Industrie ihre Anwendung.
So können Entwicklungen der Steuer- und Regelungstechnik, digitaler Bildverarbeitung, künstlicher Inteligenz, autonomer Multiagentensysteme und der Sensorik zum Beispiel in Fertigungsanlagen eingesetzt werden. Ebenso ist es im Haushalt der Fall. Es gibt auch eine spezielle Rescue League für den Katastropheneinsatz.
HAW-Robotfußball
| | | |
Dem unendlichen Einsatz der verantworlichen Professoren Kai von Luck und Gunter Klemke und vieler unermüdlicher Helfer zum Dank gibt es im RobotLab funktionable Ausrüstung für mindestens sechzehn KI-hungrige Studierende.
Das Projekt läuft analog zur RoboCup Junior League.
Benutzte Hardware: Board, Aktoren, Sensoren
Als Kernstück eines Fußball-Roboters im RobotLab präsentiert sich das AKSEN-Board aus dem „Labor für Künstliche Intelligenz“ der Fachhochschule Brandenburg.
| | |
Es ist unter anderem mit diversen analogen und digitalen Eingängen, Schnittstellen für mehrere Motoren und Servomotoren, einem LCD-Display und Dip-Schaltern ausgestattet (genaue Peripherie hier ).
Die Eingänge haben wir mit unterschiedlichen Sensoren und Aktoren belegt:
|
|
|
| | ||
Infrarot DiodenSharp Distanz Sensoren Taster / Schalter |
Das Fahrgestell haben wir mit LEGO konstruiert. Die Motoren sind ebenfalls LEGO-kompatibel. Alles weitere haben wir mit möglichst wenig Heißkleber und Kabelbindern befestigt.
|
|
|
| |