| |
|
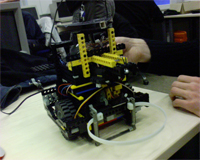
Der Robbie
im neuen Gewand.
|
| Es tut sich was
Das erste Re-Design stand an.
Aber der Umbau kann sich sehen lassen. Kaum noch Ecken am Gehäuse. Es fehlen nach wie vor noch die Bumper, dafür hat der Torsensor seinen Platz gefunden. Die Räder wurden gewechselt und die Achse verstärkt.
Die Schussvorrichtung wurde entfernt. Wie sich aus den ersten Test ergab, schlug der Servo-Motor extrem beim Stromverbrauch zu. Also geht's jetzt mit der Sparversion zur Sache. Einen Ballkäfig aus dickem Kabelbinder. Vorteil hierbei ist die elastische Form, die Frontalaufprälle abbremst :-)
Mittlerweile haben wir auch einen Tragegriff angebaut, der sonstige Obere Teil bedarf aber sicher noch einiger Anpassungen.
Des weiteren finden Überlegungen statt, dem Robbie den Rundumblick
zu schenken - oder wo war der Ball noch mal?
Nun kommt es drauf an: "Findet der Robbie das Tor" |
|
|
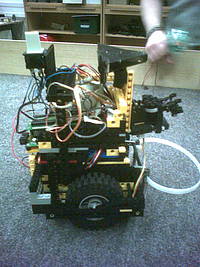
Weitere Verbesserungen
standen an
Wir haben uns zwar gegen den
Rundumblick entschieden (weniger ist manchmal mehr), da
hier zusätzliche Lötarbeiten anfallen würden und wir von
anderen Teams auch gehört haben, dass die nicht besonders
gute Erfahrungen damit gemacht habe. Dafür wurde der Abschussmechanismus
weiter verbessert. Neben dem Greifen des Balls mit dem Kabelbinder,
kann der Kabelbinder jetzt in 2 Ebenen angehoben werden.
In der mittleren Stufe kann der Ball gerade so unter den
Kabelbinder rollen und so zeitnah gegriffen werden ohne
dass unser Abschussmechanismus den Ball trifft. Jener schießt
dann den Ball (leider mit relativ wenig Kraft), wenn der
Kabelbinder ganz angehoben ist.
Außerdem wurde die Stabilität
der Sensoren weiter verbessert, um ungeahnten Überraschungen
vorzubeugen. Das Design wurde besonders an den Seiten noch
etwas runder gestaltet, so dass mechanische Verklemmungen
etwas seltener wurden.
|
Die
Programmierung
Unser Programm arbeitet ohne
extra Threads. Das gesamte Design basiert auf dem
Subsumption-Konzept. Da wir nur mit minimaler
Sensoren-Anzahl arbeiten, ist die Programmierung da relativ
einfach gehalten. Das spannendste ist sicherlich der Timer,
der Verklemmungen erkannt:
Wir speichern den zuletzt an
die Motoren gegeben Befehl, und vergleichen ihn mit dem
Kommenden. Ist dieser Vergleich 2s lang 'true', fährt Macker
rückwärts und dreht in die Richtung der weiter entfernteren
Wand. Das Besondere an dieser Lösung im Vergleich zu anderen
Robotern ist, dass wir unabhängig sind von der Höhe und
Funktion irgendwelcher Sensoren, um die Verklemmung zu
lösen.
Des Weiteren galt während der
Programmierung natürlich unsere Aufmerksamkeit besonders
unserem Abschussmechanismus, genau der präzisen Ansteuerung
des Servos. Aber auch hier war es mehr ein try-and-error
Verfahren, was zur Anwendung kam. Je mehr Tests wir
durchgeführt haben, je genauer konnten wir den Servo-Motor
einstellen, um optimale Ergebnisse zu erhalten.
|