 |
|
|
Macker
in der internen Endfassung (leichte Änderungen folgen
evtl. für das externe Turnier)
|
|
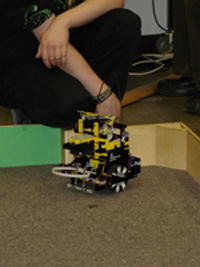
Die Endfassung fürs interne
Turnier (das reichte zum Sieg...)
"Macker" (so nun
der Name unseres Robots) kann nun elegant mit seinem Kabelbindergreifer
den Ball kurz halten, sich zum Tor drehen und schießen.
Leider ist auch in dieser Fassung noch der Schuss mehr als
kläglich, nur selten reicht die Schusskraft aus um von der
Mitte des Spielfeldes bis zum gegnerischen Tor zu kommen.
Aber das hinderte uns nicht am Sieg. Entweder die gegnerischen
Roboter ohne Greifer "wir dribbeln und brauchen keinen
Greifer" machten mal wieder eines ihrer unzähligen
Eigentore oder Macker schnappte sich halt den Ball erneut
und schoss ein weiteres Mal.
Da Macker ja Verklemmungen
mit Wand und anderen Robotern erkennt (unabhängig von der
Höhe irgendwelcher Sensoren), löste er sich regelkonform
aus Verklemmungen in dem er ein Stück rückwärtsfuhr, machte
damit jedoch häufiger den Weg für den gegnerischen Roboter
frei (welcher aus den verschiedensten Gründen die Verklemmung
ignorierte), der nun vor dem leeren Tor stand.
Im Finale hätte uns dieses
Feature fast den Sieg gekostet. Der Gegner ging mit 1-0
und 2-1 in Führung, weil wir breitwillig den Weg aufs leere
Tor freimachten. Zum Glück konnte Macker dann in der Verlängerung
das entscheidende Tor zum 3-2 Entstand erzielen!
|


