 |
|
|---|---|
Mobile Roboter mit Omnidirektionalen Antrieb WS2006/2007 |
Implementierung
Bei der Implementierung wurde nicht auf eine reine Subsumption-Architektur gebaut. Vielmehr auf eine Misch-Architektur aus Subsumption und Automaten.
Das Verhalten wurde in einzelnen Funktionen gekapselt. Mögliche Bewegungsrichtungen sind Vorwärts, Rückwärts, Drehen Links/Rechts. Weitere Bewegungen sind das seitlich nach Links/Rechts bewegen und um einen Ball links/rechts herum drehen, hierbei ist zu beachten, das keine echte seitliche Bewegung möglich ist, da hier eine Omnidirektionale Plattform mit jeweils nur drei Rädern genutzt wird, dazu kommt die grobe Abstufung der Motortreiber, sie liegt bei 10 Stufen, ab der dritten Stufe beginnt, das Rad sich erst zu drehen. Somit ist eine 7 Stufige Geschwindigkeitssteuerung der Motoren möglich. Näheres kann man in diesem Schaubild sehen
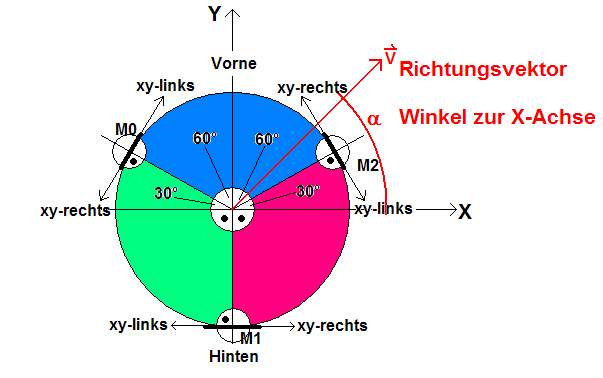
und dieser Excel-Tabelle entnehmen
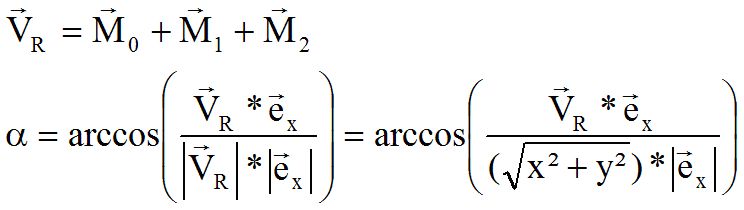
Berechnungs Grundlage ist die Vektoralgebra.
Unser Quellcode
Mehr geht zwar immer, aber ich wollte mehr dazu nicht schreiben ;-)