 |
|
|---|---|
Mobile Roboter mit Omnidirektionalen Antrieb WS2006/2007 |
Der Omnidirektionale Antrieb
Omnidirektionaler Antrieb
Das Kernstück eines omnidirektionalen Antriebs ist ein sogenanntes omni-Rad oder Omniwheel.

Auf der Umlauffläche eines Hauptrades sind dabei weitere, meist tonnenförmige Hilfsräder angebracht, deren Drehachsen im rechten Winkel zur Drehachse des Hauptrades liegen.
Wird das Hauptrad angetrieben, blockieren die Hilfsräder und dienen als Lauffläche des Hauptrades. Wird der Antrieb gestoppt und das Fahrzeug in eine andere Richtung bewegt, beispielsweise durch ein zweites, im rechten Winkel angebrachtes Omniwheel, drehen sich die Hilfsräder und minimieren somit den Reibungswiderstand des Rades. Durch diese Art der Konstruktion wird eine schnelle Fortbewegung in nahezu jedem Winkel zur Laufrichtung des Hauptrades ermöglicht.
Unser Roboter hat 3 solcher Omniwheels. Deren anordnung der Motorachsen sind zueinander symetrisch im 120 Grad Winkel.
Wenn man nun die Richtung der Räder sich anschaut, dann stellt man fest das sie alle auf einer Gerade bewegen, welche zu den anderen Geraden in einem 60° Winkel befindet.
Nun kann man mit Hilfe der Vektorrechnung hergehen und die Auswirkungen analysieren, wenn man nun alle drei Vektoren mit einander addiert, bekommt man den resultierenden Vektor und über ArcCos(Multiplikation des resultierenden Vektors mit dem Einheitsvektor durch die Multiplikation der Beträge des resultierenden Vektors und des Einheitsvektors) läßt sich der Winkel des Richtungs-Vektor berechnet, wohin der Roboter fährt.
Bei den FU-Fighters aus Berlin ist eine etwas andere Anordnung der Motoren gewählt worden, sie ist auf eine bestimmte Richtung hin optimiert worden, um mehr Geschwindigkeit für diese Richtung zu erhalten.
 (Abb. von Oliver Köckritz (FU-Fighter))
(Abb. von Oliver Köckritz (FU-Fighter))
Desweiteren gibt es noch das Omnidirektionale Fahren mit Mecanum Rädern,
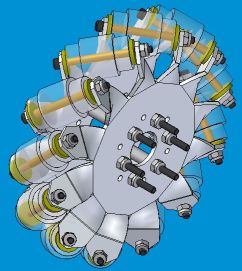

oder bei einer Gabelstabler-Firma. Eine Auflistung typischer Bewegungen mit dem Mecanum System kann man hier lesen. Übrigens sind Mecanum-Räder nicht billig.
Ein etwas anderes System, das auch zu den Omnidirektionalenverhalten verhilft, bietet dieses Beispiel der Azimut 2
 .
.
Weitere Quellen zu Themen wie:
Motorik verschiedener Antriebssysteme
Omnidrive am Beispiel eines Four Wheel Robot(FU-Berliner - FU-Fighter)
Designing Omni-Directional Mobile Robot with Mecanum Wheel
Omnidirektionaler Antrieb der älteren Generation
Mehr geht zwar immer, aber ich wollte mehr dazu nicht schreiben ;-)